APP下载
APP下载 登录
登录







摘要:为满足无人机控制律参数调节及后期控制策略优化的需要,以某型无人机为应用背景,提出了一种无人机飞行控制系统地面仿真平台的设计方案。首先分析了该平台的总体设计方案,然后介绍了主要分系统的设计,最后给出界面显示和半物理仿真结果。半物理仿真结果表明:该平台设计合理,具有一定的工程价值。
关键词:无人机飞行控制系统;总体方案;分系统;仿真平台;界面显示
无人机的用途日渐广泛,功能日趋完善,其飞行控制系统逐渐复杂,不确定因素也越来越多。飞行控制系统作为无人机的核心,对无人机安全飞行、有效完成任务具有着及举足轻重的作用,为确保控制软件的可靠性,需要建立相应仿真系统对其进行验证。
无人机飞行控制仿真目前主要包括数字仿真和半物理仿真。半物理仿真将系统部分实物引入仿真回路,尽可能真实模拟现场情况,较数字仿真更能有效验证飞行控制系统的可靠性,尤其在初期试飞调参及后期控制策略改进阶段,应用广泛。
文中利用现有的工程化辅助工具,建立无人机飞控设计与仿真试验平台,可用于无人飞行器的建模、飞行控制系统研究和开发、工程实现、半实物仿真和飞行试验各个阶段。
1 总体方案
以标准化体系结构为标准,利用计算机技术和工业标准总线技术,构建高性能飞行实时仿真系统,以满足可靠性、可用性和易维护性要求。同时,作为先进飞行控制系统和航空电子关键技术的验证平台,还要满足系统的模块通用性、资源的可配置、可重构和可测试性。
将飞行仿真计算机、地面测控计算机、飞行控制计算机、惯性导航、三轴模拟转台、负载模拟器及执行舵机等单元闭环连接,构成半物理仿真系统,如图1所示。
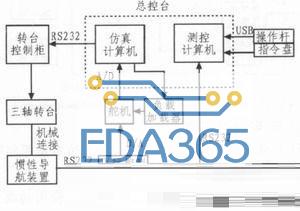
如上图所示地面仿真系统配置舵机的测角装置实时采样验证机的舵面运动信号,通过仿真计算机解算验证机空中的飞行运动特性,产生转台运动的激励信号,仿真计算机将此信号通过串口通讯传给转台控制柜,控制转台模拟飞行器姿态变化,由于惯性导航装置安装在转台上,惯性导航装置将感受到的信号传给飞控计算机,飞控计算机根据控制律对当前的状态进行控制,并将解算出的姿态信号、飞行数据等经变换后传给舵机,舵机产生动作,舵机测角装置将测到的角度通过转化通过并口传给仿真计算机,从而形成闭环控制。
2 主要分系统设计
2.1 无人机仿真系统
人机仿真系统是整个半物理仿真系统的一个主要部分,它的计算任务繁重,与其它分系统的关系密切,输入/输出参数量大。
仿真计算机采用台湾研华公司的工控机,研华ADAM562V主板,CPU为PⅣ3.0G,DDR/2G内存,250G硬盘,128M独立显卡,19英寸LCD显示器,并配有型号为PCLS-711的模拟输入接口板卡。型号为PCIS-722的数字接口。
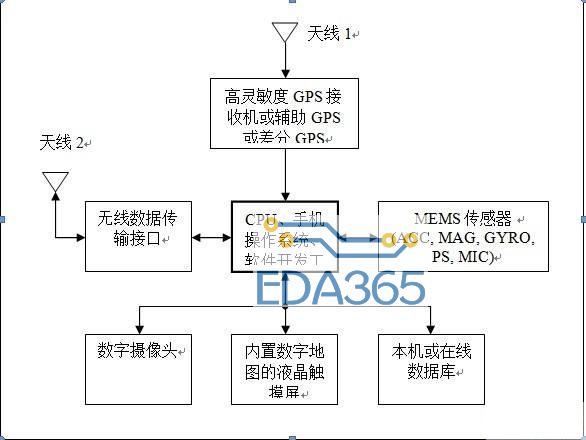
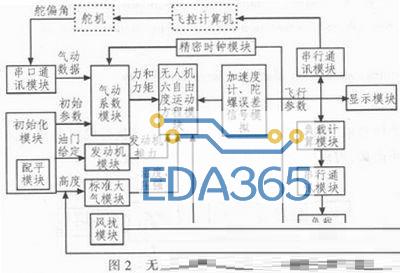
无人机数学模型为六自由度非线性全量运动方程,具有高阶多变量非线性时变特性。仿真软件用四元数计算姿态角,四阶龙格库塔法解算动力学微分方程。飞行仿真系统的数学模型非常复杂,为使软件逻辑清楚、界面清晰,需要进行模块化设计,按照模块化建模的思想,将动力学模型分解为气动系数模块、发动机模块、风扰模块、大气模块、初始化配平模块、串口通讯模块、多媒体时钟模块、绘图模块、加速度计、陀螺误差模拟模块、负载计算模块和无人机动力学方程模块,各模块之间的信息传递关系如图2所示。
2.2 无人机飞行控制系统
飞行控制系统是整个系统的核心,它负责着系统数据的采集、余度管理和控制律的计算等重要任务。
该地面仿真平台中飞行控制器选用TI公司的高性能处理芯片TMS320F28335,该芯片是一款TMS320C28X系列浮点DSP控制器,具有精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等优点,并具有TI公司所开发的功能强大的CCS软件平台。
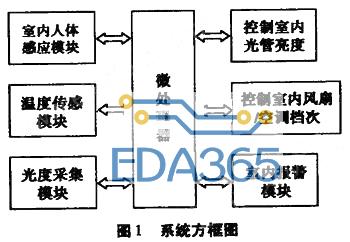
飞控软件按照软件T程设计准则,采用模块化结构进行设计,使用C语言编程。软件主要由初始化模块、核心管理模块、自主导航模块、遥控遥测模块、容错模块和输出模块等组成。其系统图如图3所示。
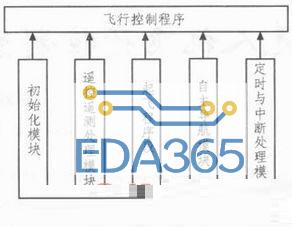
在上图中初始化模块完成系统软、硬件的初始化以及参数的设置,完成主板、AD/DA和串口等硬件设备的初始化以及中断设置等;遥控遥测模块接收并执行地面指令以及发送遥测数据;起飞和着陆模块分别控制无人机的起飞和着陆;自主导航用来对无人机进行按航路自主导航;定时与中断处理模块完成与时间有关的周期性任务和中断管理等。
2.3 无人机地面测控系统
无人机测控系统主要用于传输地面操纵人员的指令,用于传送无人机的状态参数、位置坐标等信息给地面站,实时显示无人机的飞行参数、飞行姿态、航向和航迹,还可以对飞行数据进行保存和回放。
无人机地面测控系统由测控计算机实现,测控计算机的主板为研华ADAM-562V,测控汁算机是在Windows环境下运行的计算机,操纵杆通过USB接口接入测控计算机,RS232为标准通讯接口,将键盘介入板卡上,输出接至显示器,这部分实现了离散指令的输入和输出;将操纵杆接到PC机上,完成连续指令的输入和输出。
对于实时飞行控制的相关功能来说,最重要的是保证对无人机飞行控制操作的准确性与实时性,这就需要设计一种尽可能简单直观、便于地面操作人员操作的人机交互界面。本测控软件采用Windows 2000操作系统,以VC++6.0为开发环境,利用MFC,使用自顶向下的设计方法,将程序从系统架构上划分为3个层次,6个子模块来进行开发。如图4所示。
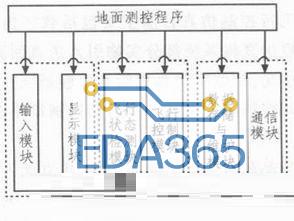
在测控软件中,输入模块负责响应和处理地面操纵人员的各种操作,飞行控制模块根据地面操纵人员的输入组织遥控指令帧序列,调用通讯模块的接口向机载系统发送遥控指令帧,飞行状态监测模块负责从数据存储模块读取并分析遥测帧数据,向图形显示模块提供飞行状态以及遥测数据分析结果。数据存储与维护模块既存储从通讯模块获取的遥测帧数据,也记录测控计算机发送的遥控指令帧,同时提供读写接口以供其他模块调用。通信模块主要负责各个模块间的数据和指令传输,显示模块用于显示无人机的飞行状态、遥测数据及参数曲线。
3 半物理仿真界面显示
3.1 仿真软件界面显示
仿真软件主要用来飞行器动力学解算,即实现飞行器飞行动力学的实时数字仿真运算,按照模块化设计思想,在VC++6.0的环境下,基于MFC,设计界面如图5所示。
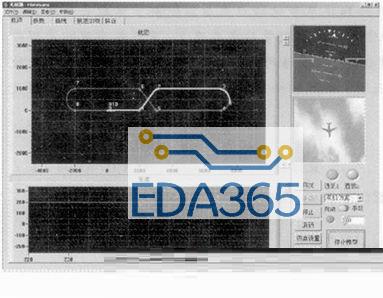
在该界面中显示自主飞行时的航迹、高度、飞行参数和姿态变化的曲线,也可以用来航迹加载,设计满足了要求。
3.2 半物理仿真试验
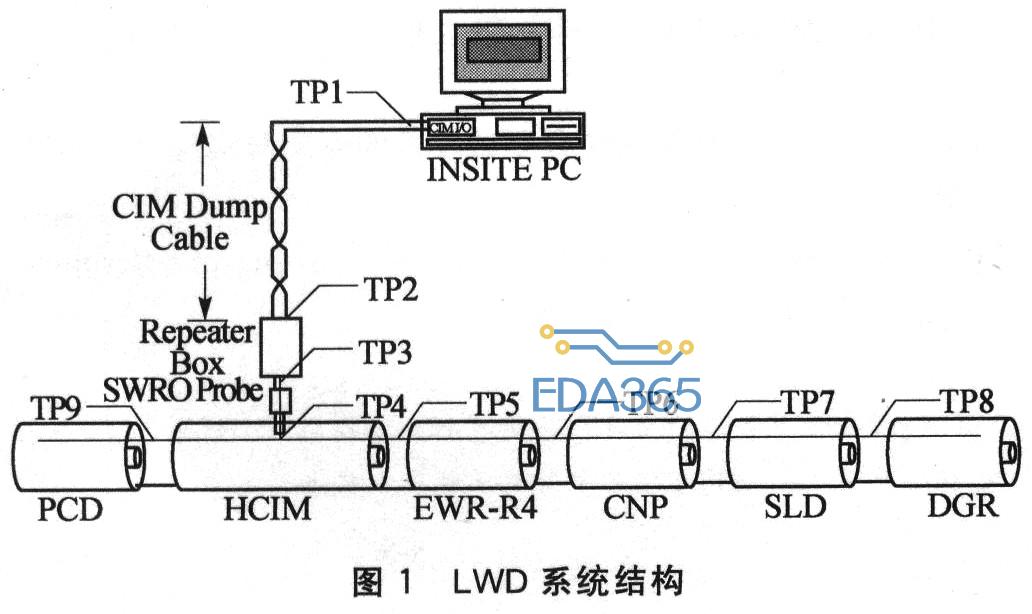
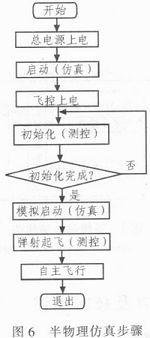
在无人机飞行控制系统的研究与研制过程中,半实物仿真占据了较大的试验内容。如图1所示的系统图,将各个分系统按照正确的方式连接起来,操作步骤如图6所示。
无人机自主飞行航迹如图7所示。
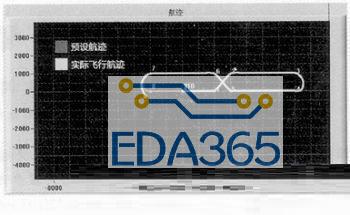
由图7可知,无人机能够按照预设的航迹自主飞行,整个过程中,直线段部分,无人机航迹偏距较小,在转弯部分,偏距较大些,但是偏距在误差范围内,在第8个航点时,无人饥完成自主飞行任务,自主降落。半物理仿真试验表明:该仿真平台可行,具有一定的工程应用价值。
4 结束语
文中所提及的无人机飞行控制系统地面仿真平台已做成成品,并且具备无人机进行飞行状态人工引导飞行和自主飞行全过程物理仿真试验、检验无人机飞行控制系统技术可行性的功能,为以后无人机的研究奠定了坚实的基础。








 热门文章
热门文章