APP下载
APP下载 登录
登录







1 引 言
具有跟踪能力的中等增益圆极化天线是中继通信卫星和卫星移动通信这两种通信系统的关键部件之一。对于卫星移动通信系统来说,系统解决了大量稀路由通信地区的通信、乡村通信和客运、货运、海运、航空、抢险救灾、野外勘测、公安侦察、部队调动等移动载体的“动中通”业务。相控阵天线安装在海陆空的运动载体上,完成对通信卫星的跟踪和通信。近几年得到了快速的发展,其应用功能主要包括卫星电话、传真、电子邮件、数据连接、位置报告以及车(船)队管理等。
相控阵天线目前被公认为是最先进的通信天线,它通过控制数字式移相器使波束精确地跟踪卫星,同时实现信号传输。相控阵技术应用于中继通信卫星和卫星移动通信系统有许多其他技术无法比拟的优点:跟踪波束的快速扫描能力;天线波束形状的快速变化能力;优异的空间定向与空域滤波能力;空间功率合成能力;天线与载体平台共形的能力。
按照天线的跟踪方式,可以分为机械跟踪系统和电子跟踪系统。机械跟踪系统是利用机械方法驱动天线将波束指向卫星。电子跟踪系统是利用移相器改变天线单元的相位,控制天线方向图使其波束指向卫星。本文采用电子跟踪方案,通过GPS结合电子罗盘采集天线载体运动及姿态信息,通过波控机控制移相器,完成天线的自动跟踪。
2 系统分析与设计
2.1 系统结构设计
要实现天线对通信卫星的自动跟踪,有两种方案:一种是基于通信卫星导频信号的方案,即天线自动对全空域进行扫描,寻找通信卫星的导频信号并使天线对准导频信号最强的方向,这种方案对于静止的用户十分有效,但对于运动中的用户而言却不适用,原因是用户时刻都在运动,天线相对于卫星的波束指向需要实时改变。另一种是借助移动用户本身与运动状态有关的信息,诸如:移动载体的速度,地理位置等,利用一定的算法实时计算天线对卫星的波束指向并指向卫星。本文采用的是第二种,即基于GPS结合电子罗盘的自动跟踪方案。
相控阵天线由辐射阵列、可控数字移相器、波束控制器以及1:19功分网络等部分组成,功能框图如图1所示。
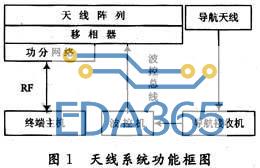
天线单元选用圆形微带贴片天线,组阵后可获得较大范围内的波束扫描。功分网络采用微带形式,可以做到与阵面良好的共形。由于天线单元的频率特性覆盖了目前导航接收机的天线频率,且增益满足要求,因此可选择其中一个单元作为导航接收机天线。导航接收机采用GPS/GLONASS/北斗兼容接收机,与波控机的接口之间采用串行接口总线。波控机根据导航接收机送来的用户运动信息计算天线波束指向并控制移相器移相使天线波束自动对准选取的通信卫星。
2.2 天线单元设计
在众多天线单元中,微带天线单元最适合用于卫星通信相控阵天线系统中,其特点是:剖面薄、体积小、重量轻;便于把馈电网络与天线结构做在一起,适合用印刷电路技术大批量生产;能与有源器件和电路集成在同一基板上;便于获得圆极化,容易实现双频段、双极化工作。由于该天线工作在L波段,接收和发射共用一幅天线,其百分比带宽约为8.5%。同时,为增加相控阵俯仰方向扫描范围,要求阵列单元的增益、轴比方向图应具有宽角特性。由于阵元数目较多,单元形式应尽量简单,以减轻天线重量和阵元之间的互耦作用,从而避免重量的超标和阵列电性能的损失。经过比较,辐射单元选用单馈源双频微带天线,图2为其结构示意图。在贴片表面开槽,切断了原先的表面电流路径,使电流绕槽边曲折流过而路径变长,贴片等效尺寸相对增加,谐振频率降低,可使天线小型化。选择适当的槽从而控制贴片表面电流以激励相位差90°的极化简并模,从而形成圆极化辐射和实现双频工作。
图3为辐射单元在收发频段的驻波特性。同时,单元增益可达7 dBi,轴比在带宽范围内小于6 dB,满足天线对频带和增益的要求。
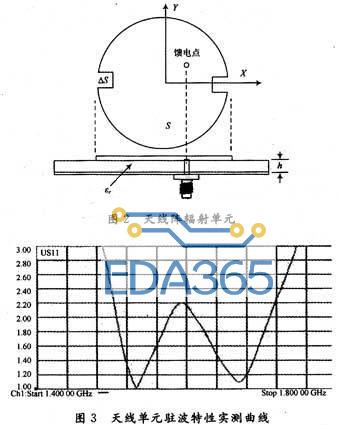
在分析设计时发现:随槽的长度增加,天线谐振频率降低,天线尺寸减小;天线尺寸的过分缩减会引起性能的急剧劣化,其中带宽与增益尤为明显,而方向图影响不大;增加介质板厚度可改变天线的带宽,但将引起表面波损耗,同时,重量明显增加。因此,开槽需在小型化与性能之间折衷,带宽需要在天线增益和重量之间折衷。
2.3 波束控制器的设计
波束控制器是相控阵天线的重要组成部分。由于相控阵天线波束的扫描和跟踪是由波束控制器实现的,因此,波束控制器很大程度上决定了天线的动中通性能。
移动用户在行进中其位置与姿态不断改变,要保证不间断通话,应不受载体位置、姿态变化的影响,天线波束必须始终对准卫星信号方向。天线波束跟踪采用开环控制方式,波控机由单片机、GPS OEM板、驱动单元及数字移相器组成。单片机通过RS 232接口与搭载GPS OEM板联接,用来读取移动用户的实时位置、姿态信息。根据通信卫星、移动用户天线的坐标,单片机经过坐标变换、角度算法计算,求得运动用户天线指向通信卫星信号的俯仰、方位角(θ,φ)。根据指向角(θ,φ),同一单片机计算出要求的阵内相位差,量化后得到每个移相器(3 b)的波束控制码,通过驱动单元控制移相器工作,从而实现移动用户天线波束自动跟踪、扫描工作。波控机的硬件组成如图4所示。 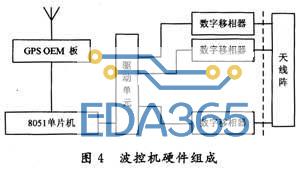








 热门文章
热门文章