APP下载
APP下载 登录
登录







(6)逐个周期式电流限制
CS端由变压器初级电流信号来驱动,如果CS端电压超过0.75V电流检测比较器会立即终止PWM的周期,用一个小的RE滤波器接到CS端并紧靠控制器,用推荐的方法抑制噪声。内部一个18Ω的MOSFET放掉外部电流检测滤波器上的电荷,每个周期放电一次,放电MOSFET在一个新的PWM周期开始后导通40ns,做前沿尖刺消隐,电流检测比较器非常快速地去响应,以缩短噪声脉冲,对电流检测滤波器和检测电阻布局时非常关键,电容与CS端滤波器必须紧靠器件,并直接接到CS和AGND端。如果用电流互感器,其两个引线紧绕滤波网络,并紧靠IC。当用电流检测电阻时,所有对噪声敏感的小功率地线连接都要接在一起,然后接于AGND,并用单一线再接至功率地。
(7)打嗝工作模式
LM5046提供一个限流重起时段去禁止控制器输出并强制一次延时重新起动, (即打嗝模式),如果限流条件迅速检测出来,数个逐个限流周期式需要由外部电容在RES端调节,在每个PWM周期中,LM5046从RES电容处或者源出或者漏入电流,如果检测出限流条件,则5μA电流漏被禁止,30μA电流源被使能,如果RES电压达到1.0V阈值,重起顺序出现。
◇SS和SSSR电容完全充电;
◇30μA电流源关断,10μA电流源开启;
◇一旦RES端电压达到4.0V,10μA电流源即关断,5μA电流漏开启,RES电容上的电压下斜到2V;
◇一旦RES电容电压达到2.0V阈值,10μA电流源再次开启,RES电容电压在4.0V和2.0V之间上下共八次;
◇当计数达到八次时,RES端电压下拉低,软起动电容释放重新开启软起动过程,当SS端电压达到1.0V时,PWM比较器将产生第一个窄脉冲;
◇如果过载条件在重新起动后持续,将开始逐个周期式限流,并再次增加RES端电容的电压,重复在打嗝模式之下;
◇如果过载条件在重新起动后不再延长出现,RES端将保持地电平,其由5μA电流漏保持继续正常工作。
打嗝模式功能可以用将RES接到ACND来禁止。在此结构下,逐个周期式保护将立即限制最大输出电流,没有打嗝状态再次出现。
(8)PWM比较器
LM5046脉宽调制比较器是一个三输入端器件,它比较RAMP端的信号,环路误差信号或软起动信号,无论谁为低电平,都去控制占空比。这个比较器为了实现可控制的最小占空比,将工作速度最佳化,环路误差信号系从外部反馈并给隔离电路形成控制电流进入COMP端,COMP端电流在内部由一对NPN晶体管镜像出来,它通过一支5kΩ电阻接到5V基准,结果控制电压经过1V的变化,经过2:1的电阻分压器加到PWM比较器。
光耦检测器可以接于REF端和COMP端之间,因为COMP端由输入电流控制,经过光耦检测器的潜在差异接近常数,带宽限制相位延迟,通常由光耦的有效电容插入,从而大大减小。更高的环路带宽可以达到,因为带宽限制与光耦一起的极点,现在其在更高的频率处,PWM比较器的极性与COMP端没有电流流入结合在一起,使控制器产生最大的占空比。
(9)RAMP端
在RAMP端的电压提供调制的斜波给PWM比较器,PWM比较器在RAMP端调制斜波信号,经环路误差信号去控制占空比。调制斜波信号可以执行,或者作为正比于输入电压的斜波,或者作为电压前馈模式的控制。RAMP端由内部MOSFET(RSD (ON)5.5Ω)来重新设置,能使RAMP端,或为电压型或为电流型控制,允许控制器以最佳控制方法工作,其仅取决于设计约束。
(10)斜率(SLOPE)端
在占空比大于50%的情况,峰值电流模式控制会产生次谐波震荡,次谐波震荡是监视宽窄占空比下的正常特性,这可以用加入一个人造斜波来消除之,此即斜率补偿去调制RAMP端的信号。SLOPE端提供一个斜波电流源,从0~100μA,其频率为RT设置的振荡频率作为斜率补偿,斜波电流源在SLOPE端用来以不同方式给RAMP信号加上斜率补偿。
①如图2(a)SLOPE和RAMP端可以通过合适的电阻一起接在CS端,这种结构将射入电流检测信号加上斜率补偿到RAMP端,但是CS端没有见到任何斜率补偿,因此,在
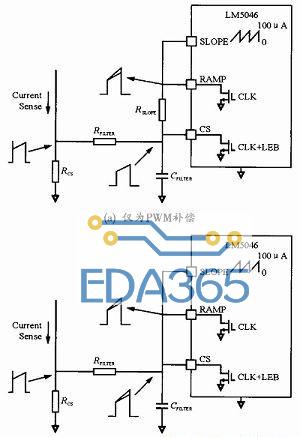
②在第一个图中,如图2 (b)SLOPE、RAMP和CS端可以接在一起。在此结构中,斜的电流源从SLOPE端出来通过滤波器电阻电容流出。因此,CS和RAMP两端将见到电流检测信号加上斜率补偿斜波。在此图中,电流限制工作由斜率补偿完成,限流设置点将会改变。
如果不需要斜率补偿,在电压前馈模式控制中,SLOPE端必须接到AGND端。当RT端同步到外时钟时,推荐禁止将SLOPE端加上斜率补偿,由外部从VCC到CS端接上一支合适的电阻来完成。
(11)软起动
软起动电路允许功率变换器很好地达到稳定状态工作点,因此要减小起动应力和电流浪涌。当偏压加到LM5046时,SS端电容由内部MOS-FET将其放电。当UVLO、VCC及REF端达到工作阈值内时,SS电容被放开,开始由20μA电流源重新充电,一旦SS端电压跨过1V,SS将控制占空比,PWM比较器是一个有三输入端的器件,它比较RAMP信号应对软起动和环路误差信号之间的较低信号。在典型的隔离应用中,在二次侧建立起偏置源后,二次侧的误差放大器开始软起动并建起闭环控制来取代从SS端的控制方法。
关断调节器的一种方法是将SS端接到GND,这样强制内部的PWM控制信号到GND,迅速减少输出占空比到0,相关的SS端开始软起动周期使正常工作恢复,第二个关断方式是在UVLO部分设置。
(12)栅驱动器输出
LM5046提供四个栅驱动器,两个浮动的高边栅驱动器HO1和HO2,两个接GND的低边驱动LO1和LO2。每个内部驱动器都能源出1.5A峰值漏入2A峰值电流。初始时,HO1和LO2先一起导通,随后四个栅驱动都关断,然后HO2和LO1一起导通,低边栅驱动器直接由VCC供电,而HO1和HO2栅驱动器则从升压电容处供电,升压电容接于BST1/BST2和HS1/HS2之间,一个外部二极管接于VCC和BST之间,提供高边栅驱动的功率,其能量从VCC给升压电容充电得到,当高边MOSFET导通时,BST1升到峰值电压为VCC+VHS1。此处VHS1为开关结点电压,BST和VCC电容要紧靠LM5 046的相应端子,以防止寄生电感,减小电压传输,推荐BST电容为0.1μF,或者再大一些,一个低ESR/ESL电容用于此处,防止HO传输压降。
如果COMP端为开路,输出将工作在最大占空比,最大占空比对每一相都有死区时间其由RD1电阻设置,如果RD1电阻为0,则最大占空比略小于50%,因IC内有一个固定的死区时间,内部固定的死区时间为30ns,它不会随着工作频率变化,最大占空比对每个输出都可以用下面公式算出
此处,T1是由RD1电阻和FOSC设置的时间,FOSC是震荡频率。例如,设置400kHz振荡频率,T1时间由RD1电阻设在60ns,结果DMSX为0.488。(未完待续)








 热门文章
热门文章