×


0 引言
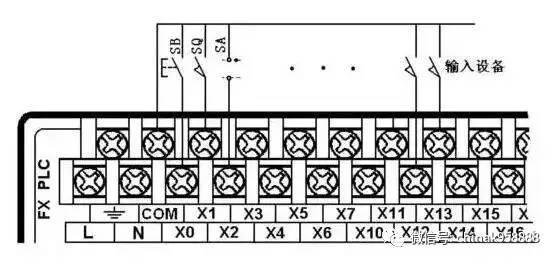
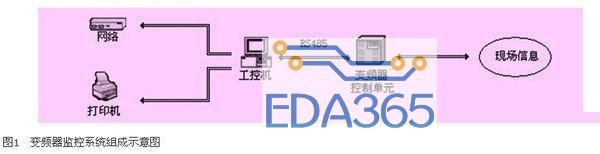
在公路桥梁等大型结构健康监测、机器状态监测等工作中,经常需要检测振动加速度信号。一个典型的振动加速度在线监测系统包括:加速度传感器、振动加速度采集卡、工控机、数据库服务器等,如图1所示。监测系统在传感器正常安装和连接后,有时可能会由于施工等原因造成传感器松脱、传感器导线中断等异常连接状态;监测系统在调试阶段,传感器往往尚未连接至导线或采集板卡,也会表现为一种异常连接状态。如果监测系统不对传感器连接状态加以区分,将正常连接下的数据和异常连接下的数据全部存入数据库,则必然会给数据库增加不必要的负担,造成数据污染。另外,为了方便传感器的检修,也有必要自动识别传感器的连接状态。
本文考虑振动加速度传感器以下四种连接状态的区分:正常安装连接状态;传感器安装松脱状态;远端(图1中A点)处传感器未连接上导线;近端(图1中B点)处导线未连接上采集卡。
文献对传感器自身是否存在故障的两类分类问题进行讨论。文献对位移传感器的线圈断裂、短路等完全失效性故障和松动、线圈老化等部分失效性故障两种情况的识别问题进行讨论。文献对振动传感器的偏置、冲击、短路、开路等硬故障和漂移、50 Hz周期干扰等软故障两种情况的识别问题进行讨论。文献对传感器漂移、冲击、干扰、短路、断线等具体故障进行分类识别。目前,国内外尚未发现对上面提到的振动加速度传感器四种连接状态进行自动识别问题进行讨论的文献。
1 加速度信号特征参数的定义
文献利用小波包分解提取各频段的能量作为特征。本文通过观察采集的大量振动加速度传感器四种连接状态下的信号的频谱,提出了自己的一组参数作为识别的原始特征集。
图2为四种传感器连接状态下采集的加速度信号频谱的示例。从图中可看出,传感器远端断开情况,由于线路较长,50Hz工频干扰最大,见图2(c);对采集卡处断开情况,没有太突出的50 Hz工频干扰,各种干扰和噪声成分最为丰富和复杂,见图2(d);传感器正常连接和传感器松脱情况下的频谱最相似,见图2(a)和图2(b),相对而言,松脱状态下的高频稍弱一点。综合考虑,定义了如下8个特征参数作为原始特征:
(1)特征1、特征2、特征3分别为:0~45 Hz频段能量,50 Hz能量,大于55 Hz频段能量。
(2)特征4、特征5、特征6分别为:0~45 Hz频段能量在以上三个频段总能量中的占比,50 Hz能量在三个频段能量中的占比,大于55Hz频段能量在三个频段能量中的占比。
(3)特征7:熵指标。将信号频域谱线i的幅值Ai除以频域所有谱线的幅值之和得到该谱线的广义“概率”值pi,定义频谱熵指标。此熵指标反映了频域信号能量的集中和分散程度,频谱能量分布越分散,则熵越大;图1(d)昕示情况下的熵指标应最大。
(4)特征8:重心频率。在信号频域定义谱重心频率。此指标为整体上反映信号频率高低的一个指标。[page]
2 加速度特征参数的降维与连接状态的分类识别
2.1 降维
第1节定义的8个特征参数肯定有一定相关性,可通过特征变换来进一步降维,以提高分类识别的效率和推广性。本文采用基于可分性判据的方法来进行特征变换降维,具体方法如下:
(1)对获得的四类连接状态的8维用于学习的特征样本,求样本类内离散度矩阵Si、总类内离散度矩阵Sw、样本类间离散度矩阵Sb。
式中:Xi为第i类的样本子集;mi为第i类的样本子集的均值向量;Si为第i类样本的类内离散度矩阵;Pi为第i类样本个数占总样本个数的比例;Sw为总类内离散度矩阵;D为类别数,这里为4;m为总均值向量;Sb为类间离散度矩阵。
(2)求白化变换矩阵B及白化变换后样本Y。基于Sw的特征值分解,确定消除原分量相关性的K-L变换矩阵U=(u1,u2,…,uD)和归一化矩阵(Λ是Sw的本征值对角矩阵),则有:
(3)求白化变换后样本的类问离散度矩阵。
(4)基于的特征值分解,确定K-L变换的本征向量U’和本征值Λ’,取d个最大本征值对应的本征向量为W,即W=[u1,u2,…,ud],后文取d=3。
(5)求特征变换降维后的最终样本Y1。令Y1=W’Y则得到降维后的样本。
2.2 分类识别
基于降维后的学习样本,可以设计分类器,以对传感器四种连接状态进行分类识别。本文采用简单有效而被广泛采用的近邻法(Nearest Neighbor Classification)来进行分类。即将降维后的学习样本作为标准样本,将每次新获得的8维原始样本通过预先确定的降维矩阵B和W降维为待检样本;然后,在标准样本中找出与待检样本距离最近的样本,将其类别确定为待检样本的类别。
3 实验与结果
实验是用一ICP加速度传感器检测工控机开机时上表面的振动,采集卡采用的是NI公司的4474卡,见图1。实验中模拟的加速度传感器的四种连接状态的具体形式是:
(1)传感器吸在工控机上表面并与4474正常连接;
(2)传感器松放在工控机上表面并与4474正常连接;
(3)传感器端与导线的接头断开;
(4)4474端与导线的接头断开。每种状态下共采集50组数据,采样率均为10 kHz,采样长度为100 000个点。
用四种状态下的前30组数据进行学习。按第1节的方法计算这些数据的原始特征,形成8维的原始特征向量。按第2节的方法分别求出白化变换矩阵B、本征向量U’和本征值Λ’;从式(6)中的最后三个特征值很大可知,降维后的维数应取d=3。降维后的最终学习样本集Y1(3×120矩阵)见图3。由图3可知,四类连接状态的学习样本在降维之后能完全分开。
用四种状态下的后20组数据进行分类测试。首先计算每组数据的8个原始特征,基于学习阶段确定的降维矩阵对每个样本进行降维,这里降为3维;然后,与标准样本——学习样本进行一一比对。结果显示,方法对四种状态下的每个测试样本都能正确分类识别,测试正确率为100%。
4 结论
本文定义了表征振动加速度传感器连接状态的8个特征,并结合基于可分性判据的特征降维和近邻法分类,形成了识别振动加速度传感器四种连接状态(正常连接、松脱、远端导线断开、近端导线断开)的一种方法或者说途径。实验显示所提方法切实有效。相信该方法在结构健康监测、机器状态监测等中大有可为,通过自动识别振动加速度传感器的连接状态,可避免系统调试及使用过程中出现的异常连接数据进入数据库,造成数据污染、增加数据库负担;同时,该方法也可为传感器的检修提供参考。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 屏幕锁定系统的设计与实现
屏幕锁定系统的设计与实现




 APP下载
APP下载 登录
登录







