×


1 引言
采煤机是煤矿井下主要的生产设备,不仅需要较大的牵引力,而且需要频繁的启动和换相,工作环境十分恶劣,因此要求调速系统具有防爆、防潮以及防尘等要求。
采煤机牵引主要有液压牵引和电牵引两种方式。前者故障率高,维修费用大;后者有运行可靠,系统反应快,效率高,可四象限运行,维修简单方便等诸多优点,因此得到了广泛重视。SRM起动转矩大,机械特性较硬,适合频繁起停,具有坚固可靠,易于水冷等优点,因此较其他电机更适合作为采煤机的牵引。
位置传感器的应用不仅增加了系统成本和复杂程度,更重要的是降低了系统结构的坚固性,影响运行可靠性,尤其是在潮湿、振动、多尘等环境较恶劣的场合。国内外学者提出了多种可行的无传感器控制方案,如电压脉冲注入法、磁链电流法、电感模型法和神经网络法等。在此采用了简化的磁链电流法,首先以高性能DSP实现数字磁链积分器获得估算磁链,然后与当前换向位置磁链比较,确定是否到达换相位置。
2 双SRM无位置传感器控制系统
2.1 采煤机电牵引系统
采煤机的任务是同时完成落煤、装煤两道工序。双滚筒采煤机是目前应用最广的采煤机械,主要由截割部(包括截割电机、摇臂和截割滚筒)、牵引部和中间箱组成。左右截割部的电机动力经齿轮减速传递到摇臂进而最终驱动左右滚筒实现割煤,摇臂用于调整滚筒的截割高度;左右牵引部的作用是使采煤机沿工作面移动,实现连续割煤;中间箱主要包含采煤机的电气控制部分。此处研究的两台SRM分别安装在采煤机左右牵引部中,采用防爆水冷方式。
2.2 SRM无位置传感器控制策略
2.2.1 SRM的磁链特性
SRM的双凸极结构使得其通常工作在磁饱和状态,因此难以建立可以求解的精确数学模型。SRM的磁链特性可以通过有限元分析或实验测量的方法获得,其表现形式为电动机磁链、相电流和转子位置之间的曲线族。三相12/8极结构的SRM,θ=0°对应于定子凸极中心与转子凹槽中心重合的位置,此处相电感最小;θ=25°对应于定、转子凸极中心完全对齐的位置,此处相电感最大。图1a为磁链特性的二维曲线,图1b为磁链特性的三维曲线。
[page]
式中:T为离散积分磁链的计算周期;u(k),i(k),r(k)均为第k个离散周期内绕组的电压、电流和电阻值。
2.2.2 磁链-电流法
电机运行中无需每一时刻的转子位置,仅需转子的精确换相位置。简化磁链-电流法通过采样的相电压和相电流由式(3)估算出ψ,再与当前相电流对应的换相位置磁链比较,若前者大于后者就认为换相位置己到,开始换相;否则继续导通。图2为简化磁链-电流法的原理框图。
换相位置磁链一般通过最大电感处磁链ψm乘以系数K(0
式中:△θ为相邻两相的角度差;△t为两相邻换相时间间隔;kconc为角速度转换速度的系数。
转子的位置可由速度估算得出。此方法所需内存小,算法简单,结果较准确。
[page]
采煤机工作时因两台SRM是刚性连接,故转速n相同,为了确保电机的输出功率相同,仅需控制电机输出相同转矩。SRM的绕组电流平均值近似与电机输出转矩成线性关系,因此调节两台SRM绕组电流平衡就能使输出功率平衡。控制系统中从机给定输入是主机运行电流,因此,存在负载转矩差异的情况下,两台SRM仍能保持相同转矩输出,实现功率平衡。
4 实验验证
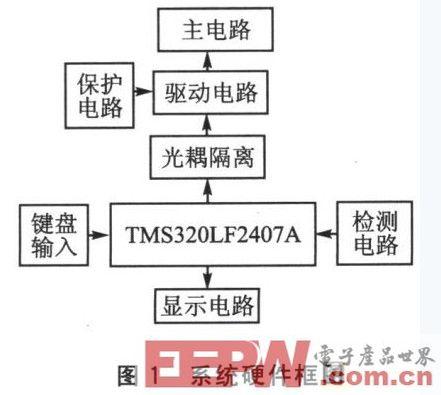
以TMS320F2812型DSP为核心控制器,在某型电牵引采煤机上对两台SRM样机进行实验。样机参数为:三相12/8结构,额定功率18.5 kW,额定电压514 V,额定转速1 500 r·min-1。主、从功率变换器均采用三相不对称半桥式结构,有源前端采用两电平可控整流结构,输入电压为三相交流380 V,直流母线电压给定为650 V。图4a为电机稳态运行时转子估计位置和实际位置比较波形。图4b为稳态运行时主、从机的定子相电流波形。
可见,通过磁链-电流法计算出的估计位置与实际位置的误差很小,能够满足系统运行需求。在双SRM的控制策略下,主、从机相电流基本相等,换相平稳,转矩脉动小,恒转矩特性较好。
5 结论
建立了电机磁链特性曲线,通过磁链、相电流对转子位置进行了估算。提出了双SRM无位置传感器控制策略。以TMS320F2812型DSP为核心控制器,搭建了两台SRM控制样机,并进行了实验。实验结果表明,两台电机输出转矩平稳,转子位置估计精确,输出功率基本平衡。在相同的负载情况下,双SRM的总转动惯量比单机系统小,运行时消耗的电能也少。当双SRM中只有一台损坏时,另一台还能正常工作,采煤机的运行可靠性更高。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 PLC的应用与发展
PLC的应用与发展






 APP下载
APP下载 登录
登录







