APP下载
APP下载 登录
登录







Apple 切入智能汽车领域,从目前来看是一个大概率的事件,而国外媒体报道有关 Apple 和现代的合作,DongA Ilbo 韩国媒体报道(彭博和其他媒体也评述了这个消息)包括 Apple 向起亚投资 4 万亿韩元(合 36 亿美元),作为与起亚合作生产电动汽车开始(在美国佐治亚州的汽车制造厂生产苹果汽车)。而报道的核心,其实是苹果基于现代起亚的电动全球模块化平台(Electric - Global Modular Platform,E-GMP),这个纯电动汽车的专用平台上,基于苹果的系统构建新的车型。我觉得本身折射的问题有两个:
1)Apple 专注的可能是座舱和自动驾驶为前端的,车辆联网和后台整合的内容,包括传统的三电部分已经成为共性技术
2) 而在全球电动汽车竞争这么激烈的情况下,现代光靠三电技术还有平台化,其实和目前的其他车企的差异化并不明显,在自动驾驶方面,现代起亚是比较保守的
01、现代的自动驾驶策略
在 12 月 10 日,现代的 IR 的文件是韩文的(자율주행 기술 개발현황),在这份文件里阐述的总体策略如下: 现代主体是基于安全策略,按照 FCA、BCA、HAD、HDP、SVM、PDW/CA RSPA 和 RPP 等单项功能进行展开,原则上在 2020(开发)-2022 年(逐步导入)L3 高速公路自动驾驶的内容。相关的 L4 方向的工作,实在 2022 年中期在首尔部分区域进行测试。 备注:现代的导入节奏,比几个豪华车企要慢一些
在感知上面,L2 和 L3 共性采用了前置摄像头和毫米波雷达,在 L3 上增加了前 Lidar 和后视觉的方案。
L2 物体识别 :车辆 / 行人 / 两轮车 / 固定小障碍物 : 短途中断,变道辅助,偏转驱动性能的改善 道路环境意识 :车道 / 停车线 / 路标 / 停车位线 / 交通灯 :提高自己的车辆位置和驾驶 / 停车位识别性能 L3 与相机 / 激光雷达(点云)相比,识别精度有所提高 识别外部物体的形状 :通过固定障碍物 / 道路边界识别提高驾驶 / 定位性能 全方位检测和检测距离增加 :识别远程目标和先前的车辆,通过识别周围的建筑物和结构来识别自己的车辆
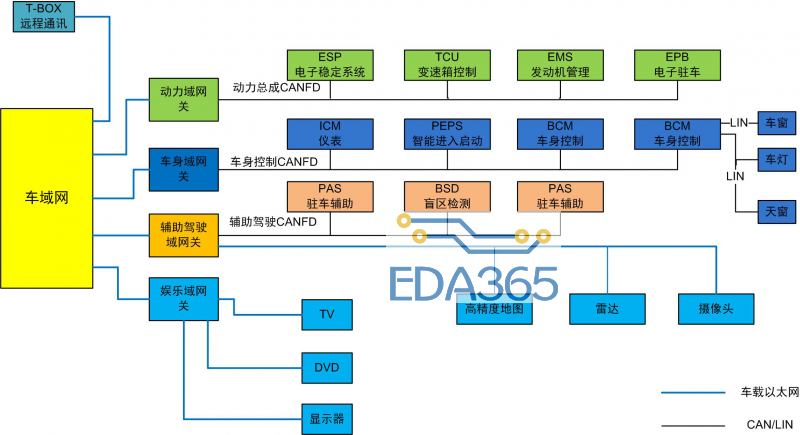
和所有的车企一样,现代也是从分布式的 ADAS 系统导入了 ADAS 的域控制器,单个传感器仅具有基本识别功能,包括传感器融合判断和控制功能位于集成控制器中,建立标准化传感器和集成控制器以及 CANFD 通道之间的输入 / 输出规格,建立了以集成控制器为中心的架构。
这里有一个简易的现代 ADAS 的域控制器架构
02、为什么愿意合作
我们可以看到基于现代起亚的状态,在三电技术开发、整车平台方面,现代做了很多。
但是基于下一步持续上量和增加电动汽车的附加值来看,现代起亚在智能化方面明显是具备一定短板的,要补齐这个领域,目前现代起亚没找到合适的合作伙伴。目前大的车企围绕丰田(日本一系类的朋友圈)、通用(本田还有微软等科技企业)、大众(福特的朋友圈)还有奔驰和宝马,这个系列很烧钱而且要持续维持电动汽车上量。
从导入 Apple 合作,势必要接受很多的变化,整个主导地位,特别是在智能化方面目前自动驾驶和智能化的连接,现代起亚如果合作成了的话,是第一家愿意给新技术打下手开放平台的企业,这条路径如果真走通了,会有更多搞技术开发玩家植入空间,甚至可以买下市值不高的汽车企业作为子公司再剥离出去部分,这个玩法就是肢解和分化的过程。
小结:我觉得今年美股和 A 股对于汽车行业的看法,从新势力的看好,还有一些传统企业的分化,其实并不是这些企业未来都能活得好好的,最主要还是看后面有更重要的力量(美国和全球面向自动驾驶和智能化方向的 IT 技术企业)来推动这个变化。传统车企如现代企业在某些方面慢了,想要完成自己的计划,可能就需要释放相当的主导权,来找到未来自己在智能汽车方向的位置(开放平台和代工来确保自己还在)








 热门文章
热门文章