在无线图像传输通信系统中,要获得较高的接收增益,需要定向接收天线对准信号发射源。本文针对由指挥车和被控车辆组成的应用平台,利用磁罗盘和GPS的定向、定位技术设计了车载定向天线云台随动系统。在该系统中,定向接收天线和磁罗盘固定在指挥车云台上,GPS接收机天线安装在指挥车上。通过随动系统控制云台转动,使定向接收天线实时对准移动中的被控车辆,以达到图像的最佳接收效果。
系统结构设计
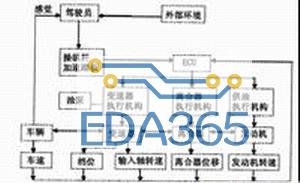
该系统主要由GPS接收机、磁罗盘、定向天线云台和以PIC18F458单片机为核心的测控计算机组成,共分为数据采集、随动控制和机械传动三部分,系统的结构示意图如图1所示。
图1中,①为指挥车上的GPS接收机,②为定向天线云台上的磁罗盘,③为定向天线云台,④为传动机构,⑤为直流力矩电机,⑥为功率放大器,⑦为测控计算机(PIC18F458),⑧为目标车辆的GPS(通过数据电台传送)。
数据采集处理部分由指挥车上的GPS接收机、磁罗盘和测控计算机等组成。指挥车和被控车辆通过GPS接收机实时获取自己的坐标位置,指挥车上 GPS数据通过串口发送到指挥车上的监控计算机。被控车辆GPS数据通过数据无线电台发送到指挥车上的监控计算机,再通过串口传给测控计算机。由磁罗盘获取定向天线云台当前方向角,通过串口传送到测控计算机。通过指挥车和被控车辆的坐标位置,计算出两者之间的方位角,并与由磁罗盘得到的当前方向角比较,得到云台应转动的角度数据。
系统的随动控制部分采用下载到测量控制计算机中的数字PID控制算法。PID控制器是根据系统的误差(本系统即为指挥车、被控车辆之间的方位角与云台当前方向角的偏差),利用比例、积分、微分计算出控制量对被控对象进行控制。通过实际系统的调试,确定PID控制器的参数。
机械传动部分主要由功率放大器、减速器、直流力矩电机、定向天线云台等构成。该部分接收控制信号和反馈角度信息,完成云台的转动。
该车载定向天线云台随动系统是典型的闭环负反馈控制系统。计算得到指挥车和目标车辆的方位角,采集磁罗盘得到当前方向角为反馈信息,两者之差为机械部分的控制信号,控制信号经过PID数字调节器、D/A转换器、功率放大器、力矩电机、减速齿轮带动云台转动,使定向天线指向目标车辆,当控制信号减小为零时,定向天线云台停止转动。从而达到定向接收天线实时对准移动目标的最佳通信状态。定向天线云台随动系统控制结构如图2所示。
系统硬件设计及算法实现
系统硬件设计
该系统硬件的关键部分是以PIC18F458单片机为核心的测控计算机。PIC18F458是美国微芯公司推出的采用RISC设计的增强型单片机,它指令周期短、处理能力强、运算能力高,并带有丰富的外围模块。
测控计算机具有丰富的外部接口,在本系统中,用到了两路串口,一路D/A输出。测控计算机的配置框图如图3所示。
外围两路RS232串口分别用于磁罗盘、指挥车监控计算机(工控机)与测控计算机通信。测控计算机的数字量控制信息经D/A转换器,作为定向天线云台的模拟量转动信号,达到定向天线云台系统的随动功能。
方位角计算
在随动功能的实现中,天线的指向由指挥车和被控车辆决定,根据两车接收到的GPS数据来计算定向天线的方位角。方位角是指以天线旋转轴为轴,以地理北极为起始点,顺时针方向旋转到天线指向的方位所经过的角度。当指挥车上的定向天线对准目标时,此时图像的传输效果最佳。[page]
按照地球模型画出GPS方位角图示,如图4所示。
图中,A为指挥车,B为被控车辆。它们的坐标分别为(λ1,φ1),(λ2,φ2),θ1为两车的经度之差,θ2为两车的纬度之差,O为地心,O1为被控车辆的纬度平面圆的圆心,R为地球半径,r为被控车辆的纬度平面圆的半径。其中,θ1=∣λ1-λ2∣,θ2=∣φ1-φ2∣。
方位角的计算:
由于指挥车和被控车辆的方位不同,方位角T取值如下:
(1)指挥车在目标的东北方向(包括北)时,T=π+∠BAC
(2)指挥车在目标的西北方向(包括西)时,T=π-∠BAC
(3)指挥车在目标的西南方向(包括南)时,T=∠BAC
(4)指挥车在目标的东南方向(包括东)时,T=2π-∠BAC
T∈[0°,360°]
PID控制算法
在随动控制中,采用数字PID技术,控制规律通过执行固化到测量控制计算机中的控制程序实现。在实际使用中,要求系统动态性能好、控制时间短、超调量小。
PID控制器由比例控制器、积分控制器、微分控制器线性组合而成,共同对被控对象进行控制,其控制表达式为: u(k)=K_{P}?e(k)+Ki?∑e(k)+
Kd?[(e(k)-e( k-1)]。本系统主流程图如图5所示。
结束语
该车载定向天线云台随动系统实现了天线的随动功能,接近了通信系统中定向天线对准目标源的理想状态,经过野外现场测试,该系统动作迅速、超调量小,达到了设计要求,取得了较满意的使用效果,在实际应用中具有较大的参考价值。









 热门文章
更多
热门文章
更多

 如何看待这波外资的电动汽车合资浪潮?
如何看待这波外资的电动汽车合资浪潮?






 APP下载
APP下载 登录
登录







