
部分或有条件的自动驾驶汽车会留下关键的盲点。MEMS6DoF惯性传感器加上GNSS、摄像机、雷达和激光雷达的组合可能是更好的选择。
为了提高汽车设计的安全性,村田(Murata)近期发布了其最新6轴一体封装、3DMEMS惯性力传感器“SCHA600系列”,惯性传感器将其数据与GNSS和许多感知传感器(从摄像机到雷达和激光雷达)融合在一起,从而在偏差稳定性和噪声方面提供高性能。
要使一个自主系统要想在任何环境下都能独立运行,就必须对周围的环境有所了解。自主系统必须对快速变化的环境作出快速反应。例如,如果一辆汽车突然停车,它后面的自动驾驶汽车必须认识到快速减速并采取规避行动。
这种全新MEMS惯性传感器的规格说明了ADAS的一个新技术:6DoF。
ADAS技术缺陷
村田认为,汽车技术发展到完全自动驾驶,即驾驶员辅助驾驶,部分自动化,有条件自动化和高自动化的四个阶段。这些阶段涉及一系列不同程度的设备:摄像头、雷达、超声波、激光雷达和GPS定位。
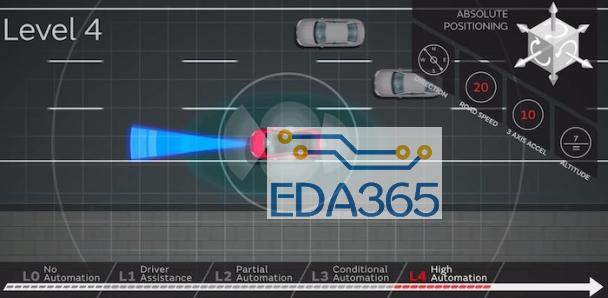
但并不是所有的这些设备都能满足6个自由度的要求,也不是所有的设备都具有在绕着三个垂直的直线轴旋转的同时测量运动的能力。
例如,相机在测量深度感知方面是有限的。其他技术,如激光雷达,对目标探测很好,但并非理想的精确定位选择。此外,GPS的分辨率太小,无法准确地知道车辆在道路的哪一边。当考虑到驾驶区域无法接收到GPS信号时,GPS的实用性会大大下降。
加速度计和六个自由度
加速度计的作用是可以在多个轴上确定当前的力。加速度计可以测量每个轴上的加速度。这种测量然后转化为速度的估计,反过来,可以用来确定位移。这样的系统可以与GPS相结合,创建一个使用加速度计产生中间读数的精确定位系统。同时,GPS可以提供速度和位置来进行粗略计算。
即使这样,三个自由度——X、Y和Z仍然不够用;汽车转弯或爬坡时,简单的三轴加速度计可能无法正确探测到这种运动。
但是一个6自由度(6DoF)加速度计不仅仅测量X、Y和Z平面上的加速度。它还可以测量偏航、俯仰和滚转轴的加速度。
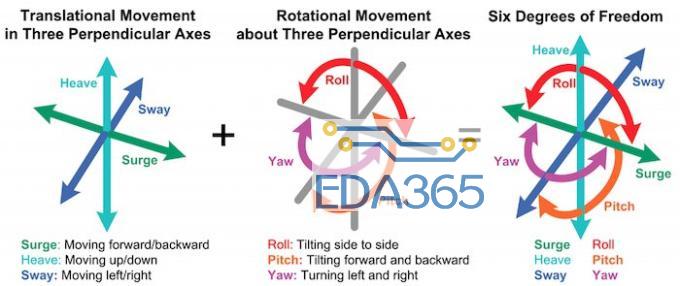
平动和旋转运动结合起来形成6个自由度
在这些轴上的运动可能不会影响X、Y和Z平面。因此,将MEMS设备集成到自动驾驶车上,可以覆盖所有六种运动和方向,产生更好的位置结果。
SCHA600
一个6自由度的MEMS设备在实际中是什么样的?Murata的新款MEMS设备是为汽车安全关键应用而设计。当与GNSS和感知传感器集成后,SCHA600可以实现高度的车辆自主,使车辆的位置和动力学精确到厘米级。

与SCHA600的通信是通过SPI实现的,同时广泛的自我诊断特性允许更安全操作。村田表示,本6轴惯性力传感器可同时符合iso26262和AEC-Q100标准,以确保它能够承受道路上可能出现的所有振动和冲击。该设备还具有自测功能,监测传感器是否在每个测量周期正确运行。
SCHA600的陀螺仪噪声均方根水平低于0.007°/s,室温下的阿伦方差下降到0.9°/h,角速率测量取决于所选的应用程序。

产品的特点
1. 为车载系统高性能化和提高设计自由度做贡献
由独家3DMEMS结构,实现了优秀的偏压稳定性、低噪、高抗振性能
将3轴角速度和加速度一体封装,能够随意设置
2. 自我诊断功能(3)
失效安全功能是本产品的特点,它运用参考信号进行监控,检测通信异常、检验bit错误的校验以及饱和、超出额定范围等异常信号。已取得专利的本公司的自我诊断功能可以对MEMS元件内部工作情况至整个信号电路是否正常工作进行验证。
(3) 自我检测异常进行诊断,并通过输出进行通知的功能
主要技术规格

主要用途
本产品以环境条件严酷,需要更高性能传感器的下列用途为对象。
高级驾驶辅助系统(ADAS)
自动驾驶(AD)
车道保持辅助系统(LKA)
航位推算法
6DoF在ADAS中的位置
对于完全自主的系统来说,测量6自由度的能力非常重要。MEMS6DoF惯性传感器,不仅适用于汽车应用;即使是无人机也会发现这种装置很有用,因为它们被设计成可以在6个轴上移动。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 AV业内人士的高谈阔论
AV业内人士的高谈阔论










 APP下载
APP下载 登录
登录







