
目前,新基建话题带来的热度还在继续,自动驾驶该如何搭上这一快车,自动驾驶又涉及到哪些核心技术,如何利用CAN智慧云提高自动驾驶安全性能?本文将对此做简要介绍。
聚焦深度转型汽车行业,我们可以将自动驾驶车当作一个“拥有人类眼睛的智能轮式机器人”可以识别周边的车辆、故障、行人等情况,并对此作出精准的行为。不难知道,自动驾驶依赖于了人工智能AI、传感器、大数据、5G等技术领域,幸运的是,自动驾驶站在这些技术的交汇处。
自动驾驶如何步入“快车道”?
自动驾驶为何会随着新基建带来的能量一起爆发,关键还是由自动驾驶的核心技术决定的。自动驾驶实际上包含了三个问题:一是我在哪儿?二是我要去哪儿?三是我要怎么去那儿?只有完美的解决这个三问题才能算是真正的自动驾驶,这其中包含的技术模块如图1所示。
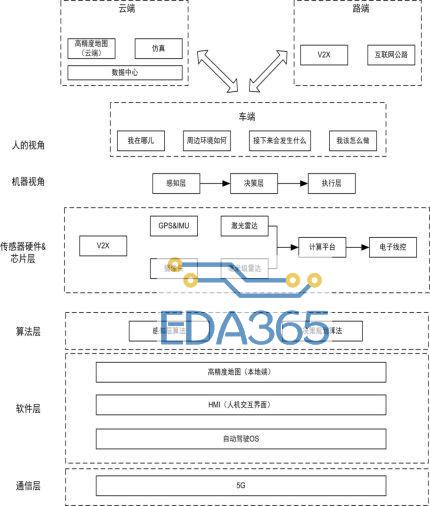
图1自动驾驶技术框图
传感器技术:摄像头、激光雷达、毫米级雷达等传感器技术融合,识别外界环境;
高精度定位:运用GPS、GNSS、IMU等技术实现厘米级定位;
AI人工智能:关键技术,充分的利用所得信息进行分析,并决定车辆该如何行驶,算法的核心任务如图2所示;
V2X通信安全:包含汽车和用户信息,对用户的身份验证和给数据加密,依赖5G的大宽带,低延时信息交互;
HIM人机交互:人机交互界面用于人工处理自动驾驶机器人无法处理的情况。
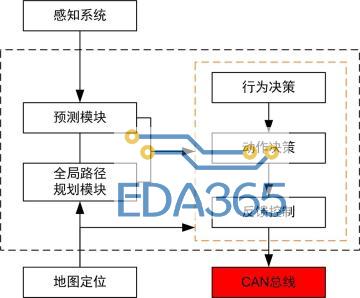
图2自动驾驶AI核心算法任务
ZWS-CAN智慧云助力自动驾驶
上述图2所示,自动驾驶通过一系列的核心算法任务后,最终会通过CAN-bus总线来控制车辆ECU工作,所以CAN通讯的质量对自动驾驶车辆的性能影响巨大,同时,CAN通讯情况的反馈帮助优化AI算法。那么,在自动驾驶路试阶段,技术人员如何远程去实时分析车辆运行情况呢?
车载CAN-bus数据记录CANDTU系列
自动驾驶车辆在路试阶段遇到问题时,测试人员很难去分析现场出现的状况或者判断车辆运行状态是否良好。通常情况下,通过对车辆CAN报文的分析才可以了解车辆的转速、压力等情况,进而进一步反馈优化AI算法任务。
ZLG致远电子推出CAN网络总线“黑匣子”,我们称之为CANDTU,测试人员可以使用CANDTU记录路试阶段的CAN报文数据,以便对车辆进行整体故障诊断。
CANDTU产品性能如下:
集成2路或4路符合ISO11898标准的独立CAN通道;
标配存储介质32G高速SD卡,支持长时间记录、条件记录、预触发记录等多种记录模式,可以进行大数据存储;
支持ASC、CSV等多种记录数据存储格式转换,方便后期软件分析;
通过严格的抗震动、抗冲击测试 ,满足工业用户需求;
具备2路DI记录和2路DO报警输出;
支持GPS定位,4G通信实时上传云端,通过手机等终端实时查看汽车定位、仪表、油温油压情况,如图3所示。
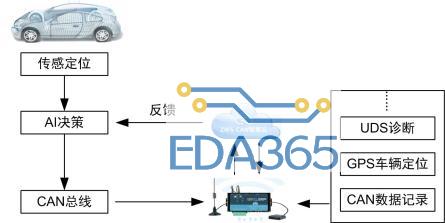
图3 CANDTU的应用
ZWS-CAN智慧云
自动驾驶车辆在路试阶段,测试人员是如果能够实时远程的监控车辆信息,第一时间掌握车辆的信息,那对提高车辆的性能会有很大的帮助。ZLG致远电子提供ZWS-CAN智慧云解决方案,通过CANDTU系列产品的4G通讯连接云端服务器,将CAN报文数据回显复现现场,实现远程监控自动驾驶车辆,进行故障诊断。那么,ZWS-CAN智慧云能够为自动驾驶车辆提供哪些特色服务和功能?接下来做简单介绍。
云端曲线,CAN报文可视化分析
ZWS-CAN智慧云能够实现DBC的可视化分析,结合丰富多彩的图形控件,及时进行CAN(FD)数据的可视化展示,直观分析车辆运行情况,如图4所示能够对信号值进行显示和信号跟踪。

图4CAN报文可视化分析
支持车载UDS诊断
用户可以通过ZWS-CAN云端服务器,直接对车辆进行标准的UDS诊断,实现对设备的监控,如图5所示。

图5 UDS诊断功能
支持北斗/GPS定位
如图6所示登陆ZWS-CAN云端服务器可以进行地图可视化的定位,实时显示车辆运行速度,对车辆运行轨迹进行记录存储。定位精度在2m左右,对车辆故障分析定位有较高的可信度,结合车辆运行状况,优化AI算法。
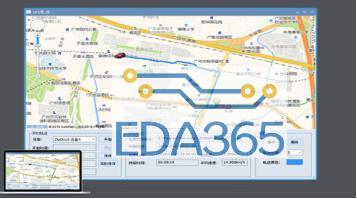
图6 GPS定位地图
自定义测试脚本
ZWS-CAN云端服务器支持自定义测试脚本,通过编辑器与执行器功能,如图7所示可以进行发送、等待、校验、校验响应等动作,实现对设备的自动化测试,方便用户远程测试车辆性能。
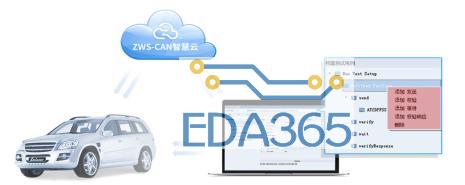
图7自定义测试脚本
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 较量升级 磷酸铁锂将掀起乘用车多大风浪?
较量升级 磷酸铁锂将掀起乘用车多大风浪?








 APP下载
APP下载 登录
登录







