×


本文提出一套基于毫米波雷达的汽车盲区监测系统设计方案。详细论述了盲区监测系统的基本原理、测试方法, 并将该系统装配在实车上进行验证测试, 实车测试结果表明, 设计的盲区监测系统可以对左右相邻车道 10 m 以内的目标车进行实时监测,当目标车持续靠近装有盲区监测系统的车辆时, 盲区监测系统及时给驾驶员提供预警信息, 避免发生汽车碰撞, 极大提升了汽车的智能驾驶辅助水平。
本文提出一种 AEBS 毫米波雷达性能的测试方法, 并进行测试应用。该方法测试设备简单, 能够降低测试成本,同时能够测试不同厂家、不同型号的毫米波雷达,对新产品的研发具有重要意义。
01、汽车盲区监测系统设计原理
一般情况下, 通过观察外后视镜, 不能看到车辆周围的全部信息, 在车辆行驶过程中,如果驾驶员在变道之前看不到盲区的车辆, 此时变道可能发生碰撞事故, 盲区监测系统是为了降低这类风险。汽车外后视镜盲区如图 1 所示。

盲区监测系统是当代汽车的一种高科技驾驶辅助配置, 主要功能是通过雷达、 摄像头等智能传感器, 对外后视镜盲区中的行驶车辆进行实时监控, 当后方行驶车辆靠近本车时, 对驾驶者进行提醒, 汽车盲区监测系统示意图如图 2 所示。

同其他传感器相比, 毫米波雷达传感器具有体积小、质量轻和精度高的特点, 并且不受目 标物体形状、 颜色的干扰, 其波长介于厘米波和光波之间,穿透雾、 烟、 灰尘的能力强, 传输距离远, 具有全天候、 全天时的特点, 弥补了红外、 激光、 超声波、 摄像头等其他传感器在车载应用中所不具备的使用场景, 在汽车盲区监测系统中得到了广泛应用。
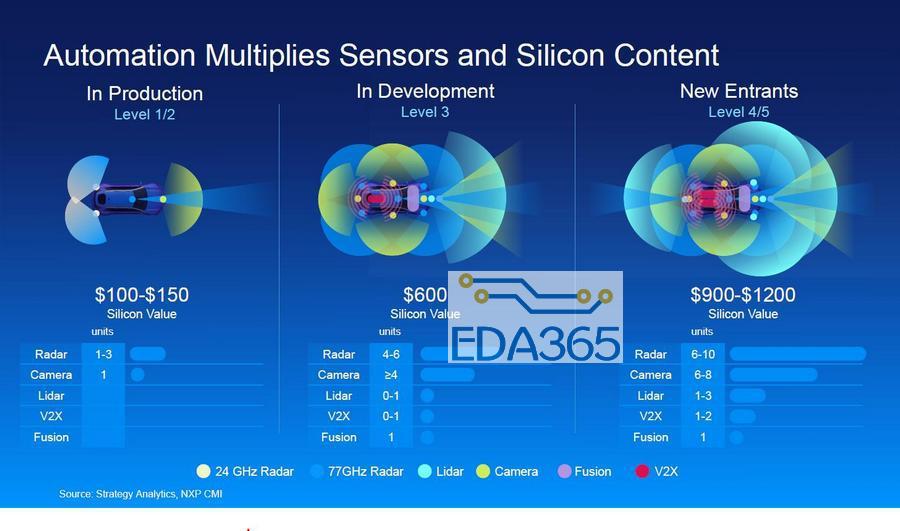
毫米波雷达向外发射电磁波, 电磁波遇到障碍物被反射回来, 反射回来的回波被雷达接收, 经过信号处理和运算, 得到障碍物的距离和速度等物理信息。按照毫米波雷达的工作频率可以将其分为 24 GHz 毫米波雷达和 77 GHz 毫米波雷达。
综合考虑各种智能传感器的优缺点, 从可靠性、 准确性、 开发成本以及开发周期等多方面综合考虑, 最终选取 77 GHz 毫米波雷达作为盲区监测系统的感知传感器, 提出基于毫米波雷达的汽车盲区监测系统的设计方案。
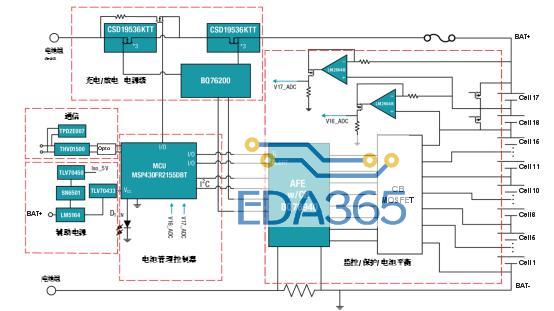
该盲区监测系统主要由 2 个毫米波雷达、 控制器、 报警灯和相关线束等组成, 如图 3 所示。2 个 77 GHz 毫米波雷达安装在车身侧后方, 在行驶过程中对周围物体进行监测, 通过电磁波的回波信号计算物体的距离信息和速度信息, 在可能发生碰撞风险时, 触发相应的报警功能, 对驾驶员进行提醒, 有效提高车辆变道、 转弯的安全性。
该系统由原车供电,通过 CAN(Controller Area Network, 控制器局域网络) 获得整车相关信息, 并输出报警信息、 控制信号和状态信息给相应模块进行报警提示。汽车盲区监测系统原理如图 4 所示。

该盲区监测系统中两个雷达之间为主从关系, 主雷达包含控制器, 作为控制决策中心, 并通过 CAN 总线与车辆进行通信, 并向车辆其他模块提供相关信号, 从雷达只承担感知作用, 并通过私有 CAN 总线将目标信息发送给主雷达。汽车盲区监测系统流程如图 5 所示。

02、汽车盲区监测系统测试方法
2.1 车辆盲区监测范围
根据 ISO 17387—2008《智能交通系统 - 变道决策辅助系统 - 性能要求和测试程序》, 车辆盲区监测范围如图 6 所示。图中的所有尺寸均为相对试验车辆而言。

注:1 为试验车辆;2 为第 95 百分位眼椭圆的中心, 应符合 GB/T36606—2018 的要求, 以 N 1 类车辆为参考;3 为由线 F、 C、 G、 B 围成的区域为直线工况下的车辆左侧盲区监测范围;4 为由线 K、 C、 L、B 围成的区域为直线工况下的车辆右侧盲区监测范围;线 A 平行于试验车辆后缘, 并位于试验车辆后缘后部 30.0 m 处;线 B 平行于试验车辆后缘, 并位于试验车辆后缘后部 3.0 m 处;线 C 平行于试验车辆前缘, 并位于第 95 百分位眼椭圆的中心;线 D 为试验车辆前缘的双向延长线;线 E 平行于试验车辆的中心线, 并位于试验车辆车身(不包括外后视镜) 左侧的最外缘;线 F 平行于试验车辆的中心线, 并位于试验车辆车身左侧最外缘的左边, 与左侧最外缘相距 0.5 m;线 G 平行于试验车辆的中心线, 并位于试验车辆车身左侧最外缘的左边, 与左侧最外缘相距 3.0 m;线 H 平行于试验车辆的中心线, 并位于试验车辆车身左侧最外缘的左边, 与左侧最外缘相距 6.0 m;线 J 平行于试验车辆的中心线, 并位于试验车辆车身(不包括外后视镜) 右侧的最外缘;线 K 平行于试验车辆的中心线, 并位于试验车辆车身右侧最外缘的右边, 与右侧最外缘相距 0.5 m;线 L 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边, 与右侧最外缘相距 3.0 m;线 M 平行于试验车辆的中心线, 并位于试验车辆车身右侧最外缘的右边, 与右侧最外缘相距 6.0 m;线 N 为试验车辆后缘的双向延长线;线 O 平行于试验车辆后缘, 并位于试验车辆后缘后部 10.0 m 处。
2.2 车辆盲区监测试验方法试验车辆以(50±2) km/h 匀速直线行驶, 目标车辆以高于试验车辆的速度匀速行驶并超越目标车辆, 如图 7 所示。

起初, 目标车辆按照表 1 规定场景的车速,在试验车辆的后边行驶。当目 标车辆的前缘超越图 6 所示的 A 线时, 试验开始;
当目标车辆的前缘超越图 6 所示的 C 线 3 m 时, 试验结束。测试完成后应在试验车辆另一侧重复进行该试验。

以场景 1 为例, 试验车辆速度为 50 km/h, 目标车辆速度为 60 km/h, 目标车辆缓慢超越试验车辆。
图 8 中 1 为试验车辆, 2 为目标车辆。通过监控分别记录左、 右侧预警灯, 将建立预警时与解除预警时目 标车辆与试验车辆之间的距离记录在测试结果中。

在试验车辆的相邻车道分 3 个区, 如图 9 所示, 当目标车辆行驶至Ⅲ号区域内的任意位置时,如果预警灯亮起(即建立预警), 则视为合格;
当目标车辆行驶至Ⅱ 号区域内时, 如果预警灯常亮(即稳定预警), 则视为合格;当目标车辆行驶至 I 号区域内的任意位置时, 如果预警灯熄灭(即解除预警), 则视为合格;Ⅱ 号区域为汽车盲区监测范围。

03、实车测试效果验证
将盲区监测系统安装在实车上, 如图 10 所示,两个毫米波雷达分别安装在汽车尾部的两侧, 系统报警灯安装在左、 右外后视镜上, 将以上各部分通过线束连接好, 并按照上述测试方法进行实车路试。

路试结果表明, 当试验车后方相邻车道 10m 以内出现目 标车时, 盲区监测系统可以实时对驾驶员进行预警。
在试验车向前正常行驶过程中,当有目标车从试验车后方进入图 6 中的盲区监测区域时, 系统将触发一级报警(报警灯常亮提示),若此时打转向灯, 立刻升级成二级报警(报警灯闪烁提示), 当目标车驶出图 6 中的盲区监测区域时, 系统立刻解除报警。
总结本文研究了基于毫米波雷达的汽车盲区监测系统的组成, 并对盲区监测系统进行实车测试, 其预警功能基本满足设计要求, 有效降低了碰撞发生的概率, 对于提高汽车的驾驶辅助水平以及产品竞争力有重要意义。
毫米波雷达发射的是电磁波,电磁波在穿过不同介电常数的物质时会发生一定的折射与反射, 这就对汽车后保险杠的材质与形状有一定的要求。后续将对覆盖毫米波雷达的塑料件进行研究, 在满足汽车外造型的同时, 努力提升盲区监测系统的性能水平。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 从摄像头开始--高级驾驶辅助系统解决方案系列介绍
从摄像头开始--高级驾驶辅助系统解决方案系列介绍








 APP下载
APP下载 登录
登录







