
控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32位、64位等,如奔腾系列CPU以及其他类型CPU。示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。
操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作
硬盘和软盘存储存:储机器人工作程序的外围存储器。
数字和模拟量输入输出:各种状态和控制命令的输入或输出。
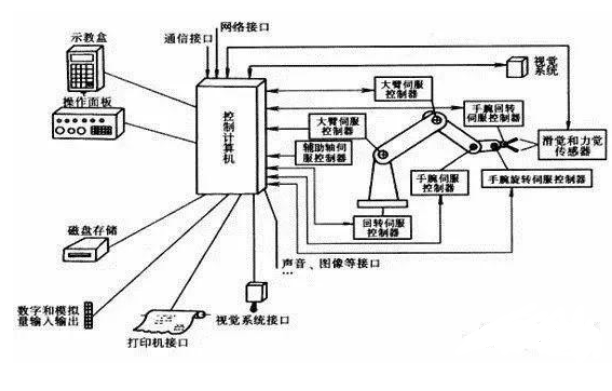
打印机接口:记录需要输出的各种信息。
传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
轴控制器:完成机器人各关节位置、速度和加速度控制。
辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。
网络接口:1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。2)Fieldbus接口:支持多种流行的现场总线规格,如Device net、AB Remote I/O、Interbus-s、profibus-DP、M-NET等。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 机器人控制电路设计
机器人控制电路设计







 APP下载
APP下载 登录
登录







