
近年来,我国服装工业迅猛发展,对工业缝纫机的性能也就提出了越来越高的要求。以直流无刷电机为动力单元的工业缝纫机正在占领原始缝纫机市场。直流无刷电机相比离合器电机具有体积小、动态性能好、控制方便等优点。新一代的工业缝纫机控制系统大部分带有光电码盘作为位置反馈来计算电机的位置和速度,此系统的优点是能准确得到电机当前位置,缺点是成本较高。
本文以直流无刷电机为控制对象,提出了一种无需光电码盘,而以霍尔信号为反馈的高性能低成本的工业缝纫机控制系统的方案。
1 系统的硬件设计
1.1 系统的性能指标
工业缝纫机大部分功能的实现最终都需依靠伺服电机控制系统完成,所以伺服系统的性能好坏是影响控制器性能的关键。其主要的性能指标要求如下:
(1)起停迅速。因为起停时间涉及剑服装加工的生产效率,所以缝纫机操作人员对设备起停时间要求较高,启停时间在200 ms和120 ms以内。
(2)定位精确。缝制过程结束后需要自动上下停针,要求机针定位精确,这影响到是否能顺利切线和拨线等操作,一般要求定位精度控制在±5°以内。
(3)起停非常频繁,一天需要工作16个小时以上,而且工作环境灰尘非常大,对控制器硬件电路的可靠性有很高的要求。
(4)调速范围宽和速度精度高。实现无级变速,调速范围200~5 000 r/min,速度控制精度《±5 r/min。
1.2 硬件方案设计
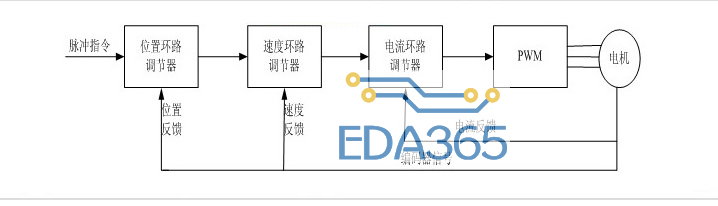
鉴于工业缝纫机伺服系统的性能指标,硬件控制单元采用Microchip公司新推出的主要针对电机控制的16位DSC控制芯片DSP IC33F。它具有一个16位CPU和一个DSP内核,除常见外设外,该芯片有一个6通道的电机专用MCPWM控制器。此装置大大简化了产生脉宽调制(PWM)波形的控制软件和外部硬件,通过编程可产生互补的三相6路PWM波形。可通过编程设置死区时间防止同一桥臂上2个功率管发生直通造成短路。芯片内既有快速DSP运算引擎,又有PIC单片机的接口驱动能力,最高可以运行至40 M IPS。芯片还为三相电机驱动控制设汁了8路PWM驱动、正交编码器接口和12位ADC等专用功能单元。功率电路采用智能功率模块IRAMS10UP60B为主体电路,针对工业缝纫机控制功能单一、管脚需求少和直流无刷电机驱动实时性强、运算复杂的特点,采用上述型号的DSC芯片可以构建一款简捷的驱动控制系统,该系统所需接口少,所用辅助线路少。因此可以有效的降低成本。整个硬件系统的原理框图如图1所示:
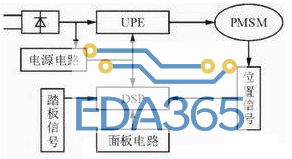
如图1所示,交流220 V电压经过整流滤波之后为IPM模块提供直流电源。DSP根据捕获的霍尔位置信号确定转子的当前位置并计算电机的转速。输出的PWM经过智能功率模块IRAMS10UP60开启相应的MOS管,逆变产生三相电压供给无刷直流电动。电机驱动工业缝纫机的机头进行工作。调节调速盒可以改变电机转速。其中IPM模块自身带有检测过温过流的电路,如检测到过温过流,立刻封锁PWM波形,并且把故障信号送到DSP进行处理。
2 控制策略和系统软件设计
2.1 电机运行的控制策略
PWM控制是直流无刷电机矢量控制系统的控制核心,任何控制箅法的最终实现几乎都是以各种PWM控制方式完成的。本系统中我们采用的是方波控制,该控制方式是以三相对称正弦波电压供电时对称电动机定子的理想磁链圆为基准,由三相逆变器不同的开关模式产生的实际磁链矢量去逼近基准磁链圆,以达到高性能的控制,同时可以较好地改善电源电压。利用效率由于该控制方法把逆变器和电机作为一个整体来考虑,因而模型构造相对简单,便于数字化实现。
如图2所示是一种典型的三相电压源逆变器的结构,逆变桥电路的电压输出分别由6个开关信号所控制。当逆变桥上半部分的一个功率晶体管开通时,其下半部分对应的功率晶体管关断。T1、T3、T5三个功率晶体管的开关状态决定了逆变器输出的相应电压的大小。
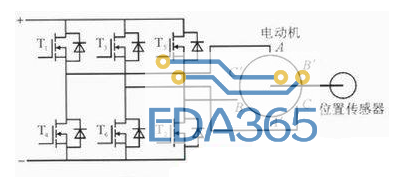
图2中,霍尔传感器在电动机转子转动一周的过程中输出6种状态。具体如表1所示。
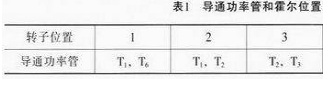
每个状态持续π/3电角度,这样就在空间上分成6个区间,与之相对应转子在相应的区间转动,每个周期里,每个功率管导通π/3电角度。定子绕组每周期正、反导通各:π/3电角度,正、反电流间隔:π/3电角度。任一时刻定子有两相绕组通电并产生定子磁动势,随着转子位置信号的变化,定子合成磁动势以π/3为步长,步进式地旋转,转子磁场在定子磁动势的作用下与之同步旋转。
2.2 系统软件总体设计
软件设计直接影响系统的整体性能。根据DSP控制系统的开发流程,采用自顶而下的没计方法依次主要包括以下几个模块:
(1)系统初始化模块。
(2)主程序是个循环等待中断的过程,一旦有中断发生,则转去执行相应的中断服务程序。
(3)电机调速模块:根据用户设置及脚踏板的控制信号,结合改进的积分分离PI算法调节电机转速。
(4)故障处理程序:故障监视程序是保护系统安全工作比较重要的一环,一旦故障发生,立刻封锁PWM的输出,启动智能功率模块的保护。
3 实验结果与分析
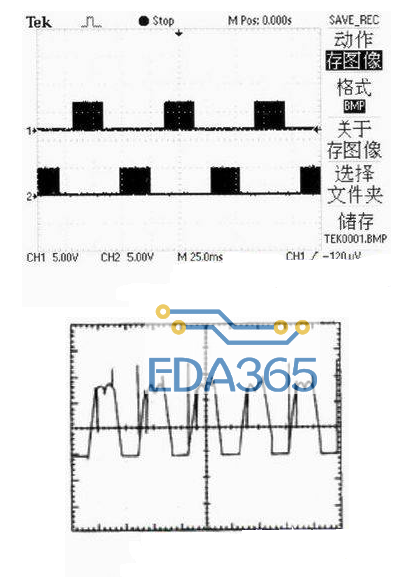
以上述的系统设计和控制策略,我们对电路板进行实测,测试条件是直流母线电压为380 V,PWM的频率为10 kHz、死区时间为2μs,互补工作模式,由于PWM为中心对齐模式,所以死区时间会插在有效占空比的两端。图3为PWM波形。硬件的测试平台详图略。由此我们可以看出整套系统的可行性和稳定性。图4为电机的反电动势的波形。
4 结束语
本文对工业缝纫机控制系统进行了设计和分析,表明系统具有较好的控制效果,各项性能指标都满足设计要求。由于不再使用光电编码器或霍尔传感器作为反馈元件,降低了整个系统的成本,同时提高了可靠性,具有较高性价比。该设计不但适用于工业缝纫机,也适用于其他的伺服控制系统中。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 工控机死机的原因_工控机死机了怎么办
工控机死机的原因_工控机死机了怎么办







 APP下载
APP下载 登录
登录







