
智能车身控制系统(MAGIC BODY CONTROL)与主动车身控制系统(ABC)基本相同,在原ABC 基础上扩展了立体摄像头识别路面状况的附加功能。智能车身控制系统和前一代的主动车身控制系统 (ABC)从设计与功能而言,梅赛德斯-AMG车辆和梅赛德斯-奔驰的量产车之间也无差异。
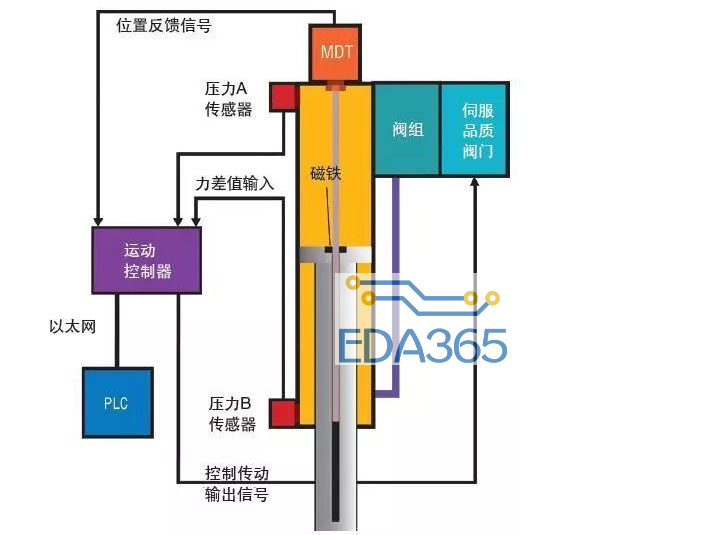
整个静态和动态负载部分都由悬挂减震柱承载。可调式液压缸(活塞)与减震器弹簧串联布置。减震器在弹簧的平行方向起作用。为了给悬挂减震柱的液压缸提供液压油,系统还配有油泵、前轴阀体总成、后轴阀体总成和储液罐。

系统可根据实际的行驶状况需求,自动调节悬挂设置。主动控制系统使驾驶变得“十分舒适”,且“ 富于动感体验”。智能车身控制系统 (MAGIC BODYCONTROL)使得驾驶员可通过按钮在两种性能之间进行选择。主动悬挂控制系统的主要功能是由液压可控操纵缸来实现的,它们与主动减震器和螺旋弹簧一同进行悬挂控制。
减震器弹簧元件能够主动抑制5赫兹以下的车身震动。因特殊路况而发生纵向和侧倾运动时、因极限侧倾角而转弯时、因制动车体倾斜时将产生此类震动。5 赫兹以上的震动由主动减震器来抑制。在行驶过程中,液压部件驱动活塞移动,进而会施加额外的力来影响螺旋弹簧的效果。根据车身的俯仰、侧倾或纵向运动,弹簧座的位移会改变弹簧的张力,进而抵消车身的运动。压力等级和持续时间取决于用于收到的当前车辆水平高度和车体加速度的传感器信号。
主动车身控制系统 (ABC) 控制单元可通过传感器和联网控制单元接收与驾驶状态和驾驶方式相关的信息。根据具体情况以及舒适 / 运动开关的状态,控制单元会通过阀体总成调节悬挂减震柱的压力,以控制车辆减震和车身运动。
径向活塞泵用于供应液压压力。由发动机通过皮带驱动。主动车身控制系统 (ABC)的压力供应分为几种状况。平坦路面上的油压和系统压力要求较低,向前行驶时,主动车身控制 (ABC) 转换阀(Y5)将会在系统压力大于180巴时打开。例如,如果系统压力由于快速行驶等原因而降到速度感应系统压力阈值特性170巴以下,以及主动车身控制 (ABC)进油节流阀 Y86/1)关闭时出现的压力增长。如果因路面情况而产生大幅度波动或因转向时横向加速度较大而致使液压油需求增加,则主动车身控制(ABC)进油节流阀的控制促动会使得压力增长。
该总线适用于运行速度快、安全可靠的传感器系统,运行速度比局域互联网 (LIN)快,且复杂程度低于控制器区域网络 (CAN)。传输速率为125或189千比特 / 秒。因此,其传输速率远远高于相对缓慢的局域互联网 (LIN)连接( 20千比特 / 秒),但低于控制器区域网络 (CAN)(大于1兆赫兹)。但是控制器区域网络 (CAN)需要更复杂的接线,成本上也更昂贵。
控制单元能够基于数据协议正确地分配来自部件的错误信号或缺失信号。对悬挂传感器进行诊断十分简单:总线要么处于工作状态,要么处于未工作状态。可直接列出出现电子故障的原因,通过简单的测试即可确定故障位置。另外机械故障也可能导致产生错误的值。
车辆动态导航悬挂会在车辆经过起伏路面之前做好准备。使用立体探测摄像头探测前方路面,以便调整每个车轮的减震,从而以最佳状态靠近凹凸路面。
为了对悬挂和减震系统进行调整,需要采集车辆前方15米的路面信息。调节过程中,系统仅考虑在后续行车路线中将要与车轮接触的路面区域。立体探测摄像头中的数据通过 FlexRay 传送至主动车身控制系统 (ABC)控制单元,主动车身控制系统 (ABC)控制单元会利用这些数据绘制出一个路面高度轮廓,其中甚至涉及到车辆后方的数据。摄像头获得的探测数据将与从主动车身控制系统 (ABC)的水平高度传感器和车身传感器那里获得的数据进行比较。因此,即便是软的障碍物(如草或积雪)也能被识别出来。
立体探测摄像头中的数据仅可通过主动车身控制 (ABC)控制单元在“舒适”模式下进行处理,且速度最高极限为130 km/h 。在遇到较矮的障碍物(如井盖或马路边缘)时无相应的数据补偿,但是可通过自适应减震和悬挂起到减震的效果。测量路面数据需要满足合适的结构和照明。在能见度低、路面光线反射(如积水路面或光滑水泥路面)以及横向和纵向晃动较大的情况下,路面测量功能会受限。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析
一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析






 APP下载
APP下载 登录
登录







