
PID控制器广泛应用于工业过程控制。工业自动化领域的大约95%的闭环操作使用PID控制器。控制器以这样一种方式组合,即产生一个控制信号。作为反馈控制器,它将控制输出提供到所需的水平。在微处理器发明之前,模拟电子元件实现了PID控制。但是今天所有的PID控制器都是由微处理器处理的。可编程逻辑控制器也有内置的PID控制器指令。
通过使用低成本的简单开关控制器,只有两种控制状态是可能的,例如全开或全关。它用于有限的控制应用,这两个控制状态足够控制目标。然而,这种控制的振荡特性限制了其使用,因此正在被PID控制器所取代。
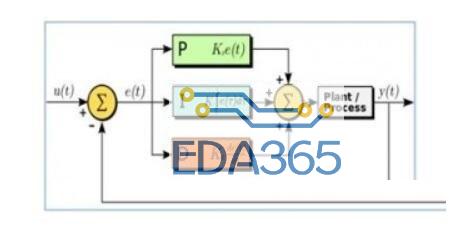
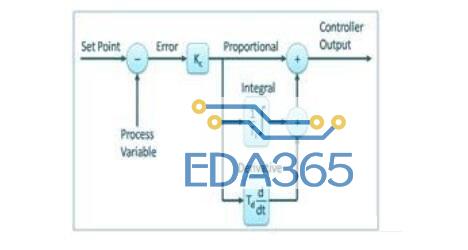
PID控制器保持输出,使得通过闭环操作在过程变量和设定点/期望输出之间存在零误差。PID使用三种基本的控制行为,下面将对此进行说明。
P-控制器:
比例或P-控制器给出与电流误差e(t)成比例的输出。它将期望值或设定值与实际值或反馈过程值进行比较。得到的误差乘以比例常数得到输出。如果错误值为零,则该控制器输出为零。
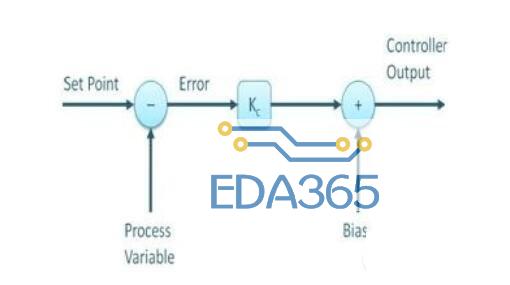
此控制器在单独使用时需要偏置或手动重置。这是因为它从来没有达到稳定状态。它提供稳定的操作,但始终保持稳定状态的错误。当比例常数Kc增加时,响应速度会增加。
I-控制器
由于p-控制器在过程变量和设定点之间总是存在偏差,所以需要I-控制器,这就提供了必要的动作来消除稳态误差。它集成了一段时间的误差,直到误差值达到零。它对最终控制装置的误差为零的值保持不变。
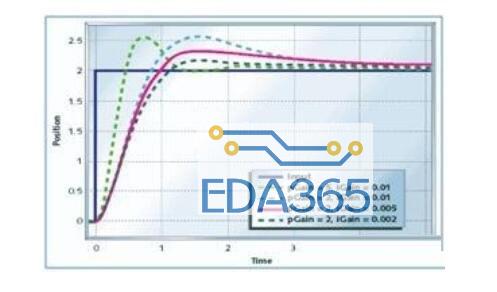
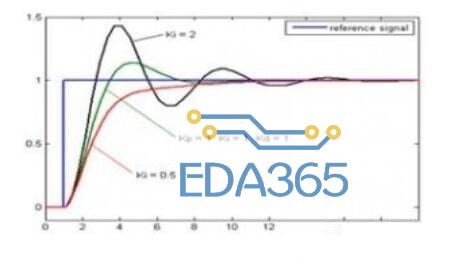
当发生负面误差时,积分控制会降低其输出。它限制了响应速度,影响了系统的稳定性。响应的速度通过减小积分增益Ki而增加。

在上图中,随着I控制器的增益减小,稳态误差也逐渐减小。对于大多数情况下,PI控制器尤其适用于不需要高速响应的场合。
当使用PI控制器,I-控制器输出被限制在一定程度的范围内,克服了积分饱和,其中积分输出的推移,即使在零误差状态增加时,由于在所述植物的非线性的条件。
d-控制器
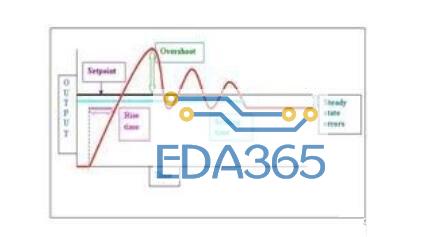
I-控制器不具备预测错误未来行为的能力。所以一旦设定值改变,它就会正常反应。D控制器通过预测未来的错误行为来克服这个问题。其输出取决于误差相对于时间的变化率,乘以微分常数。它为输出提供启动,从而增加系统响应。
在上图中,D控制器的响应比PI控制器多,输出的建立时间也减少。它通过补偿由I控制器引起的相位滞后来提高系统的稳定性。增加微分增益会提高响应速度。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析
一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析






 APP下载
APP下载 登录
登录







