
电机控制是指,对电机的启动、加速、运转、减速及停止进行的控制。根据不同电机的类型及电机的使用场合有不同的要求及目的。
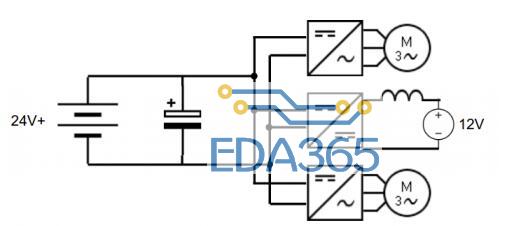
该驱动器旨在提供令人难以置信的高峰值功率,每个电机通道超过1kW。然而,能够提供这种电力的电源是昂贵的。而且,当致动器减速时,吸收能量。大多数电源不喜欢将能量转回其中。
解决方案:将大功率储能装置放在直流母线上。像这样的电池可以提供大约3kW的电量。这些类型的电池也具有相当高的充电额定值,并且如果再生仅超过几百毫秒,它们可能处理比指定的更多。因此,它们应该能够在大多数机器人应用中处理全部再生功率。
这意味着我们有一个可变电压直流母线,随着电池的充电状态而波动。因此,我们为系统供电的方式是通过DC-DC转换器。此外还有另一个好处:我们可以使用任何电压电源,只需将其转换为总线电压即可。希望大多数人会使用廉价的ATX电源(特别是12V导轨)。在许多机器人应用中,运动由几个离散运动组成,其中只有一些是高功率的。在这种情况下,我们可以获得非常高的峰值功率,但只需要非常适中的电源。
使用电池稳定直流母线的另一个好处是,如果这些驱动器中的多个位于同一总线上,则不会对总线电压的调节产生影响:单个板可以连接到DC-DC一个PSU,系统中的其他板可以使用总线。事实上,您甚至可以跳过在从属板上填充DC-DC。
该系统还能够使用制动电阻器来转储再生能量而不是电池来吸收它。这是一个更简单且可能更安全的设置,也是项目将在第一个实例中使用的内容,直到电池存储功能准备就绪。
所以这个项目对某些事情有好处,但不是一切。
您应该在项目中使用此驱动器,如果:
需要高功率:每通道1kW峰值功率!
需要高精度:编码器反馈控制意味着精度与编码器的精度一样高,可以非常高。
需要可靠性:编码器反馈可确保驱动器从定位错误中恢复:不再错过任何步骤。
在以下情况下,不应在项目中使用此驱动器:
需要高扭矩,但不关心速度,并且您不想使用任何传动装置。如果是这种情况,步进器可能更适合您的项目
如果您对非常小的电机和机器人感兴趣,那么您应该检查这些超棒的微型机器人!
如果您需要工业级电机可靠性和坚固性,则不应使用业余爱好电机。但是,驱动电子设备和软件应该在成熟时能够可靠地运行。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析
一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析






 APP下载
APP下载 登录
登录







