×


由于伺服系统服务对象很多,如计算机光盘驱动控制、雷达跟踪系统、进给跟踪系统等,因而对伺服系统的要求也有所差别。工程上对伺服系统的技术要求很具体,可以归纳为以下几个方面:
⒈对系统稳态性能的要求;
⒉对伺服系统动态性能的要求;
⒊对系统工作环境条件的要求;
⒋对系统制造成本、运行的经济性、标准化程度、能源条件等 方面的要求。
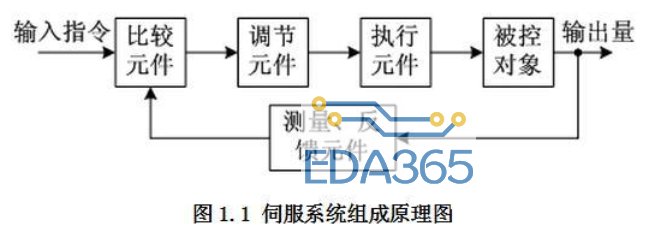
虽然伺服系统因服务对象的运动部件、检测部件以及机械结构等的不同而对伺服系统的要求也有差异,但所有伺服系统的共同点是带动控制对象按照指定规律做机械运动。从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
伺服系统组成原理框图如图1.1所示。
伺服系统组成(自上而下)
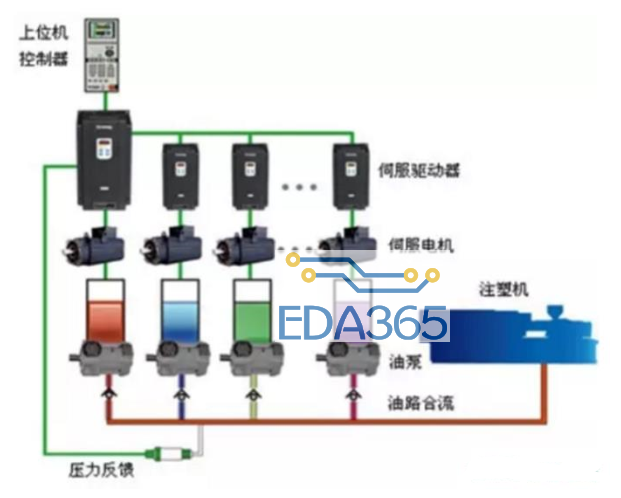
控制器:plc,变频器,运动控制卡等其他控制设备,也称为上位机;
控制器按照数控系统的给定值和通过反馈装置检测的实际运行值的差,调节控制量。
伺服驱动器:沟通上位机和伺服电机,作用类似于变频器作用于普通交流马达。
功率驱动装置作为系统的主回路,一方面按控制量的大小将电网中的电能作用到电动机之上,调节电动机转矩的大小,另一方面按电动机的要求把恒压恒频的电网供电转换为电动机所需的交流电或直流电
伺服电机:执行设备,接受来自驱动器的控制信号;
电动机则按供电大小拖动机械运转。
机械设备:将伺服电机的圆周运动(或直线电机的直线运动)转换成所需要的运动形式;
各类传感器和继电器:检测工业控制环境下的各种信号送给上位机或驱动器做为某些动作的判断标准。
伺服系统是指利用某一部件(如控制杆)的作用能使系统所处的状态到达或接近某一预定值,并能将所需状态(所需值)和实际状态加以比较,依照它们的差别(有时是这一差别的变化率)来调节控制部件的自动控制系统。
主要作用
1、以小功率指令信号去控制大功率负载;
2、在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动;
3、使输出机械位移精确地跟踪电信号,如记录和指示仪表等。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 开关磁阻电机的应用
开关磁阻电机的应用









 APP下载
APP下载 登录
登录







