
芯片型号stm32f103
主机采用spi1,从机spi2,中断接收测试
主机配置函数:
#include "spi.h"
void SPI1_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜPA¶Ë¿ÚʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//SPI_SSOutputCmd(SPI1,ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;//SPI_Mode_Master SPI_Mode_Slave
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //SPI_NSS_Hard SPI_NSS_Soft
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
SPI_I2S_ITConfig(SPI1,SPI_I2S_IT_RXNE,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = SPI1_IRQn;
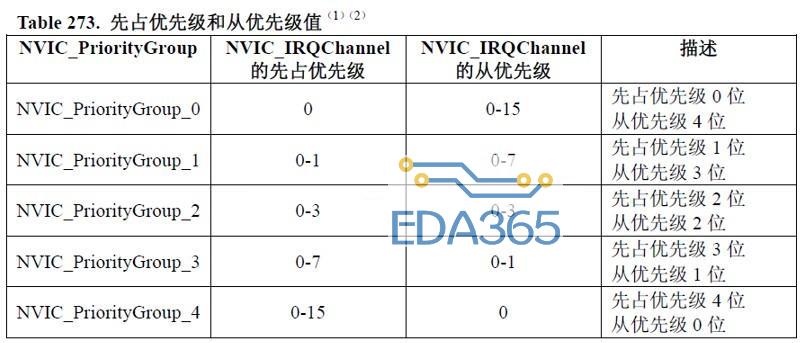
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);
SPI1_ReadWriteByte(0xff);//Æô¶¯´«Êä
}
void SPI1_SetSpeed(u8 SpeedSet)
{
SPI1->CR1&=0XFFC7;//Fsck=Fcpu/256
if(SpeedSet==SPI_SPEED_2)//¶þ·ÖƵ
{
SPI1->CR1|=0<<3;//Fsck=Fpclk/2=36Mhz
}else if(SpeedSet==SPI_SPEED_8)//°Ë·ÖƵ
{
SPI1->CR1|=2<<3;//Fsck=Fpclk/8=9Mhz
}else if(SpeedSet==SPI_SPEED_16)//Ê®Áù·ÖƵ
{
SPI1->CR1|=3<<3;//Fsck=Fpclk/16=4.5Mhz
}else //256·ÖƵ
{
SPI1->CR1|=7<<3; //Fsck=Fpclk/256=281.25Khz µÍË
}
SPI1->CR1|=1<<6; //
}
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while((SPI1->SR&1<<1)==0)//µÈ´ý·¢ËÍÇø¿Õ
{
retry++;
if(retry>200)return 0;
}
SPI1->DR=TxData; //·¢ËÍÒ»¸öbyte
retry=0;
while((SPI1->SR&1<<0)==0) //µÈ´ý½ÓÊÕÍêÒ»¸öbyte
{
retry++;
if(retry>200)return 0;
}
return SPI1->DR; //·µ»ØÊÕµ½µÄÊý¾Ý
}
u8 SPI1_ReadByte(u8 TxData)
{
u8 retry=0;
while((SPI1->SR&1<<0)==0) //µÈ´ý½ÓÊÕÍêÒ»¸öbyte
{
retry++;
if(retry>200)return 0;
}
return SPI1->DR; //·µ»ØÊÕµ½µÄÊý¾Ý
}
#include "spi.h"
#include "sys.h" //ϵͳ×Óº¯Êý
#include "delay.h" //ÑÓʱ×Óº¯Êý
//PA4 SPI1_NSS
//PA5 SPI1_SCK
//PA6 SPI1_MISO
//PA7 SPI1_MOSI
u8 Master_Temp =0;
int main(void)
{
SystemInit();
delay_init(72); //ÑÓʱ³õʼ»¯
NVIC_Configuration();
SPI1_Init(); //SPI1³õʼ»¯
SPI1_SetSpeed(SPI_SPEED_256);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
while(1)
{
SPI1_ReadWriteByte(0x22);
delay_ms(100);
}
}
void SPI1_IRQHandler(void)
{
if((SPI1->SR&1<<0)==1)
{
Master_Temp = SPI1_ReadByte(0x00);
}
}
从机SPI2配置函数:
#include "spi.h"
void SPI2_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;//SPI_Mode_Master SPI_Mode_Slave
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //SPI_NSS_Hard SPI_NSS_Soft
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_I2S_ITConfig(SPI2,SPI_I2S_IT_RXNE,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = SPI2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
SPI_Cmd(SPI2, ENABLE); //ʹÄÜSPIÍâÉè
}
//SpeedSet:
//SPI_SPEED_2 2·ÖƵ (SPI 12M --sys 24M)
//SPI_SPEED_8 8·ÖƵ (SPI 3M --sys 24M)
//SPI_SPEED_16 16·ÖƵ (SPI 1.5M --sys 24M)
//SPI_SPEED_256 256·ÖƵ (SPI 905.6K --sys 24M)
void SPI2_SetSpeed(u8 SpeedSet)
{
SPI2->CR1&=0XFFC7;//Fsck=Fcpu/256
if(SpeedSet==SPI_SPEED_2)//¶þ·ÖƵ
{
SPI2->CR1|=0<<3;//Fsck=Fpclk/2=36Mhz
}
else if(SpeedSet==SPI_SPEED_8)//°Ë·ÖƵ
{
SPI2->CR1|=2<<3;//Fsck=Fpclk/8=9Mhz
}
else if(SpeedSet==SPI_SPEED_16)//Ê®Áù·ÖƵ
{
SPI2->CR1|=3<<3;//Fsck=Fpclk/16=4.5Mhz
}
else //256·ÖƵ
{
SPI2->CR1|=7<<3; //Fsck=Fpclk/256=281.25Khz µÍËÙģʽ
}
SPI2->CR1|=1<<6; //SPIÉ豸ʹÄÜ
}
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while((SPI2->SR&1<<1)==0)//µÈ´ý·¢ËÍÇø¿Õ
{
retry++;
if(retry>200)return 0;
}
SPI2->DR=TxData; //·¢ËÍÒ»¸öbyte
retry=0;
while((SPI2->SR&1<<0)==0) //µÈ´ý½ÓÊÕÍêÒ»¸öbyte
{
retry++;
if(retry>200)return 0;
}
return SPI2->DR; //·µ»ØÊÕµ½µÄÊý¾Ý
}
u8 SPI2_ReadByte(u8 TxData)
{
u8 retry=0;
while((SPI2->SR&1<<0)==0) //µÈ´ý½ÓÊÕÍêÒ»¸öbyte
{
retry++;
if(retry>200)return 0;
}
return SPI2->DR; //·µ»ØÊÕµ½µÄÊý¾Ý
}
#include "sys.h" //ϵͳ×Óº¯Êý
#include "delay.h" //ÑÓʱ×Óº¯Êý
#include "spi.h"
u8 Slave_Temp=0;
void SPI2_Init(void); //³õʼ»¯SPI¿Ú
void SPI2_SetSpeed(u8 SpeedSet); //ÉèÖÃSPIËÙ¶È
u8 SPI2_ReadWriteByte(u8 TxData);
//PB13 SPI2_SCK
//PB14 SPI2_MISO
//PB15 SPI2_MOSI
int main(void)
{
SystemInit();
delay_init(72); //ÑÓʱ³õʼ»¯
NVIC_Configuration();
SPI2_Init(); //SPI2³õʼ»¯
SPI2_SetSpeed(SPI_SPEED_256);//SPI2ËÙ¶ÈÁ½·ÖƵ
while(1)
{
delay_ms(100);
}
}
void SPI2_IRQHandler(void)
{
if((SPI2->SR&1<<0)==1)
{
Slave_Temp = SPI2_ReadByte(0x00);
}
}
/*************************************************************/
注意事项:主机片选引脚模式为推完输出,配置为复用无法控制输出电平,从机为硬件模式,上拉输入,主机初始化SPI时候,拉高nss引脚,发数据前拉低nss,从而从机nss被硬件拉低,选中该芯片。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

--处理器的状态,模式以及概括了解内部寄存器") 快速学Arm(9)--处理器的状态,模式以及概括了解内部寄存器
快速学Arm(9)--处理器的状态,模式以及概括了解内部寄存器






 APP下载
APP下载 登录
登录







