×


加速度灵敏度轴
沿敏感轴加速时相应输出电压增加
寄存器映射
寄存器定义
0x31—DATA_FORMAT
0x2C—BW_RATE
0x2D—POWER_CTL
0x2E—INT_ENABLE
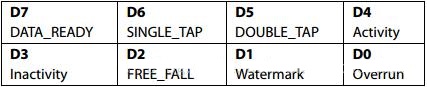
设置位值为1,使能相应功能,生成中断,设置为0时,阻止这些功能产生中断
寄存器0x1E、0x1F、0x20 — OFSX、OFSY、OFSZ。提供用户设置偏移调整
寄存器0x32至0x37 — DATAX0、DATAX1、DATAY0、DATAY1、DATAZ0和DATAZ1。保存各轴的输出数据
举例
#define DEVICE_ID 0X00 //器件ID
#define THRESH_TAP 0X1D
#define OFSX 0X1E
#define OFSY 0X1F
#define OFSZ 0X20
#define DUR 0X21
#define Latent 0X22
#define Window 0X23
#define THRESH_ACK 0X24
#define THRESH_INACT 0X25
#define TIME_INACT 0X26
#define ACT_INACT_CTL 0X27
#define THRESH_FF 0X28
#define TIME_FF 0X29
#define TAP_AXES 0X2A
#define ACT_TAP_STATUS 0X2B
#define BW_RATE 0X2C
#define POWER_CTL 0X2D
#define INT_ENABLE 0X2E
#define INT_MAP 0X2F
#define INT_SOURCE 0X30
#define DATA_FORMAT 0X31
#define DATA_X0 0X32
#define DATA_X1 0X33
#define DATA_Y0 0X34
#define DATA_Y1 0X35
#define DATA_Z0 0X36
#define DATA_Z1 0X37
#define FIFO_CTL 0X38
#define FIFO_STATUS 0X39
#define ADXL_READ 0X3B //读指令
#define ADXL_WRITE 0X3A //写指令
typedef enum
{
X, //与x轴的角度
Y, //与y轴的角度
Z //与z轴的角度
}DIR_t;
void ADXL345_write(u8 addr, u8 data)
{
I2C_start();
I2C_send_byte(ADXL_WRITE);
I2C_wait_ack();
I2C_send_byte(addr);
I2C_wait_ack();
I2C_send_byte(data);
I2C_wait_ack();
I2C_stop();
delay_ms(10);
}
u8 ADXL345_read(u8 addr)
{
u8 d = 0;
I2C_start();
I2C_send_byte(ADXL_WRITE);
I2C_wait_ack();
I2C_send_byte(addr);
I2C_wait_ack();
I2C_start();
I2C_send_byte(ADXL_READ);
I2C_wait_ack();
d = I2C_recv_byte();
I2C_ack(1);
I2C_stop();
return d;
}
void ADXL345_init()
{
u8 d;
I2C_init();
d = ADXL345_read(DEVICE_ID);
printf("ADXL345_read %d\n", d);
if(d == 0xE5)
{
ADXL345_write(DATA_FORMAT, 0x2B); //中断低电平有效,13位全分辨率模式,16g量程
ADXL345_write(POWER_CTL, 0x28); //链接使能,测量模式
ADXL345_write(INT_ENABLE, 0x00); //不使用中断
ADXL345_write(OFSX, 0x00);
ADXL345_write(OFSY, 0x00);
ADXL345_write(OFSZ, 0x00);
}
}
void ADXL345_read_XYZ(short *x, short *y, short *z)
{
u8 i = 0;
u16 buf[6] = {0};
I2C_start();
I2C_send_byte(ADXL_WRITE);
I2C_wait_ack();
I2C_send_byte(0x32); //数据首地址
I2C_wait_ack();
I2C_start();
I2C_send_byte(ADXL_READ);
I2C_wait_ack();
for(i = 0; i < 6; i++) //总共6个
{
buf[i] = I2C_recv_byte();
// printf("I2C_recv_byte [%d] %d\r\n", i, buf[i]);
if(i == 5)
{
I2C_ack(1);
}
else
{
I2C_ack(0);
}
}
I2C_stop();
*x = (short)((buf[1]<<8) + buf[0]);
*y = (short)((buf[3]<<8) + buf[2]);
*z = (short)((buf[5]<<8) + buf[4]);
}
void ADXL345_read_times(short *x, short *y, short *z, u8 times)
{
u8 i = 0;
short tx, ty, tz;
*x = *y = *z = 0;
for(i = 0; i < times; i++) //读取times次
{
ADXL345_read_XYZ(&tx, &ty, &tz);
*x += tx;
*y += ty;
*z += tz;
delay_ms(5);
}
*x /= times; //求平均
*y /= times;
*z /= times;
}
short ADXL345_get_result(float x, float y, float z, u8 dir) //计算角度
{
float t;
float res;
switch(dir)
{
case X:
t = x / sqrt(y*y + z*z);
res = atan(t); //求出弧度
break;
case Y:
t = y / sqrt(x*x + z*z);
res = atan(t);
break;
case Z:
t = sqrt(x*x + y*y) / z;
res = atan(t);
break;
default:
break;
}
return (res * 180 / 3.14); //求出角度
}
void ADXL345_main()
{
short x, y, z;
short rx, ry, rz;
ADXL345_read_times(&x, &y, &z, 10); //读出x,y,z方向加速度值
printf("x %d\n", x);
printf("y %d\n", y);
printf("z %d\n", z);
rx = ADXL345_get_result(x, y, z, X);
ry = ADXL345_get_result(x, y, z, Y);
rz = ADXL345_get_result(x, y, z, Z);
printf("rx %d\n", rx);
printf("ry %d\n", ry);
printf("rz %d\n", rz);
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 STM32单片机的复用端口初始化的步骤及方法
STM32单片机的复用端口初始化的步骤及方法







 APP下载
APP下载 登录
登录







