×


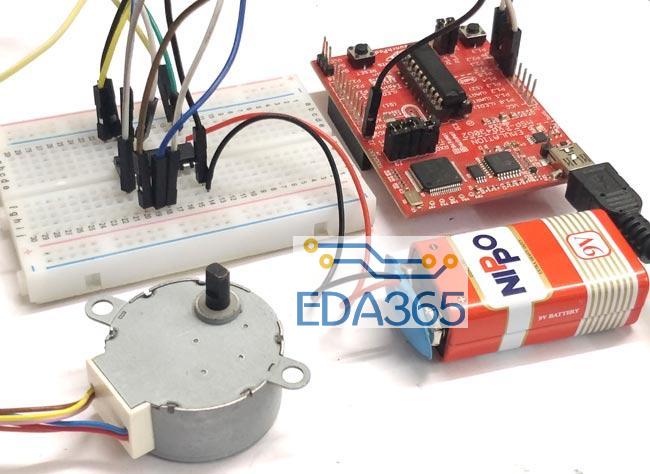
在本篇文章中,我们将介绍如何使用MSP430 LaunchPad开发板连接一个步进电机。 MSP-EXP430G2是德州仪器(TI)提供的开发工具,又名LaunchPad,用于学习和练习如何使用他们提供的微控制器。该开发板属于MSP430产品线,我们可以使用它对所有MSP430系列微控制器进行编程。如果您是MSP430的新手,请查看MSP430 LaunchPad的入门教程。
所需的材料
● MSP430 LaunchPad开发板
● 35BYJ46或28-BYJ48步进电机
● ULN2003驱动芯片
● 连接导线
● 面包板
步进电机
步进电机是一种无刷直流电机,可将电脉冲转换为不同的机械运动。步进电机的轴以不连续的步骤旋转。我们可以根据需要获得精确的步数和速度。
在本篇文章中中,我们将编写MSP430步进电机代码。完整的程序可以在本文末尾处给出,下面将解释几段重要的代码。
步进电机每转的步数为32;因此我们在代码行中写入以下内容:
const int STEPS = 32;
接下来,您必须创建一个实例,在该实例中我们指定了连接步进电机的引脚。
Stepper myStepper (STEPS, 6, 7, 8, 9);
由于我们使用的是Stepper库,我们可以使用以下代码行设置电机的速度。对于35BYJ46步进电机,速度范围在0到200之间。
Mystepper.setSpeed(200);
现在,为了使电机向前移动一步,我们可以使用以下行。
myStepper.step(STEPS);
由于我们有32步和64作为齿轮比,我们需要移动2048(32 * 64 = 2048),以完成一次完整的旋转。现在,上传以下代码,然后根据您的需要更改前进的步数。
本篇文章使用的完整代码如下:
#include
const int STEPS = 32; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 6 through 9 or you can use any pins on MSP430:
Stepper myStepper(STEPS, 6,7,8,9);
void setup() {
// set the speed at 200rpm or as you want:
myStepper.setSpeed(200);
}
void loop() {
myStepper.step(STEPS);
}
本篇文章使用的完整代码如下:
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 STM32单片机的复用端口初始化的步骤及方法
STM32单片机的复用端口初始化的步骤及方法







 APP下载
APP下载 登录
登录







