×


PWM直流电机调速仿真原理图如下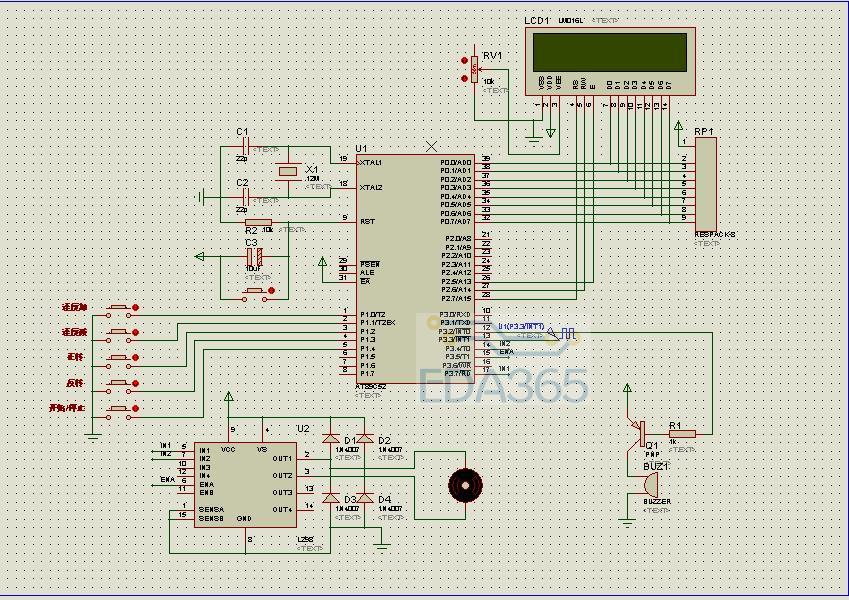
Altium Designer画的PWM直流电机调速原理图和PCB图如下:

PWM直流电机调速单片机程序如下
#include
#include
#include "LCD1602.h"
#define uchar unsigned char
#define uint unsigned int
/**********端口分配*******************************/
sbit add_key=P1^0; //占空比加
sbit dec_key=P1^1; //占空比减
sbit z_key=P1^2; //正转键
sbit f_key=P1^3; //反转键
sbit run_key=P1^4; //启动/停止键
sbit beep=P3^2;
//电机驱动相关
sbit ENA=P3^5;
sbit IN1=P3^7;
sbit IN2=P3^4;
/**********变量定义*******************************/
//电机相关定义
bit Rotation_f=0; //步进电机旋转状态标志 为0正转 1反转
bit power_flag=0; //总开关标志
#define PWM_cnt_LEN 100 //计数全长
#define PWM_ON 1 //开
#define PWM_OFF 0 //关
uint PWM_cnt; //PWM计数
uchar PWM_duty; //PWM占空比
uint speed_cnt=0; //转速
uint speed_value;
bit dis_speed_flag=0;
uint delay_cnt;
uchar dis_buf[6];
uchar dis_cnt;
uchar dis_buf1[4];
uchar dis_cnt1;
/*********定义延时1ms子程序************************/
void delay1ms(uint t)//1ms延时子程序
{
uint k,j;
for(k=0;k
for(j=0;j<120;j++);
}
/**************************************************/
/**********蜂鸣器报警**********************/
void beep_alarm()
{
beep=0;
delay1ms(100);
beep=1;
}
/*******************************************/
/**********电机停止********************/
void motor_stop()
{
IN1=1;
IN2=1;
}
/***************************************/
/*******电机正转********************/
void motor_foreward()
{
IN1=1;
IN2=0;
}
/************************************/
/********电机反转**********************/
void motor_reversal()
{
IN1=0;
IN2=1;
}
/*****************************************/
/************显示转速*********************/
void dis_speed()
{
dis_cnt=0;
if(speed_value/10000!=0)
{
dis_buf[dis_cnt]=speed_value/10000+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10000/1000+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%1000/100+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%100/10+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10+0x30;
dis_cnt++;
}
else if(speed_value%10000/1000!=0)
{
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10000/1000+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%1000/100+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%100/10+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10+0x30;
dis_cnt++;
}
else if(speed_value%1000/100!=0)
{
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=speed_value%1000/100+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%100/10+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10+0x30;
dis_cnt++;
}
else if(speed_value%100/10!=0)
{
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=speed_value%100/10+0x30;
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10+0x30;
dis_cnt++;
}
else
{
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=' ';
dis_cnt++;
dis_buf[dis_cnt]=speed_value%10+0x30;
dis_cnt++;
}
dis_buf[dis_cnt]='';
LCD1602_Print(2,0,dis_buf); //显示转速
}
/*****************************************/
/**********显示占空比*********************/
void dis_duty()
{
dis_cnt1=0;
if(PWM_duty/100!=0)
{
dis_buf1[dis_cnt1]=PWM_duty/100+0x30;
dis_cnt1++;
dis_buf1[dis_cnt1]=PWM_duty%100/10+0x30;
dis_cnt1++;
dis_buf1[dis_cnt1]=PWM_duty%10+0x30;
dis_cnt1++;
}
else if(PWM_duty%100/10!=0)
{
dis_buf1[dis_cnt1]=' ';
dis_cnt1++;
dis_buf1[dis_cnt1]=PWM_duty%100/10+0x30;
dis_cnt1++;
dis_buf1[dis_cnt1]=PWM_duty%10+0x30;
dis_cnt1++;
}
else
{
dis_buf1[dis_cnt1]=' ';
dis_cnt1++;
dis_buf1[dis_cnt1]=' ';
dis_cnt1++;
dis_buf1[dis_cnt1]=PWM_duty%10+0x30;
dis_cnt1++;
}
dis_buf1[dis_cnt1]='';
LCD1602_Print(9,1,dis_buf1); //显示占空比
}
/*****************************************/
/*************定时器初始化程序*******************/
void timer_init(void)
{
TMOD=0x11; //设置定时器0,1为16位模式
TH0=0xD8; //10ms定时初值 10ms D8F0
TL0=0xF0;
ET0=1; //定时器0中断开
TR0=1; //开定时器0
TH1=0xFF; //100us定时初值
TL1=0x9C;
ET1=1; //定时器1中断开
TR1=1; //开定时器1
EA=1; //总中断开
}
/********************************
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 浅谈AVR中定时器几种工作模式
浅谈AVR中定时器几种工作模式










 APP下载
APP下载 登录
登录







