×


足浴器的设计难点在于成本控制和温度控制系统的设计。近年来,开关电源技术的逐渐成熟,为小功率电源供电提供了一个高效率且低成本的方案,摒弃了传统的变压器降压、整流、三端稳压的低效率供电方式。而通过软件算法完善,例如PID算法的运用,可减少部分硬件开销,降低成本及系统复杂度,提高系统的稳定性。设计结合以上技术,着眼于成本最小化,性能最大化,实现了LED温度显示,双按键目标温度调节,高精度温控功能。由于主控芯片AT89C2051只有两组共16个IO引脚,2 kB的内存,因此需合理运用IO资源,程序设计简洁,合理分配内存空间。
1 系统结构设计
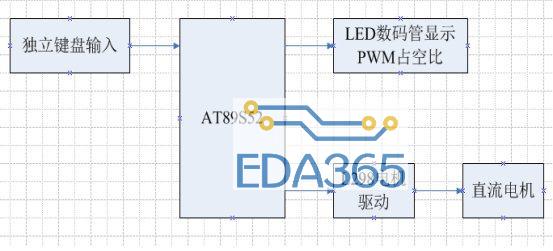
系统由供电、采样、按键、显示及单片机部分组成。
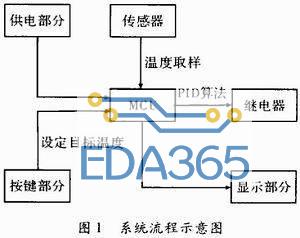
传感器负责采集温度值,传递给MCU,目标值由按键设定,MCU将采样值与目标值进行比较,经过时间PID算法处理,根据每段时间不同的温差值,计算出需要加热的时间,接着通过IO口控制继电器闭合与断开,使加热板工作,同时LED显示实时温度。
2 子模块的设计
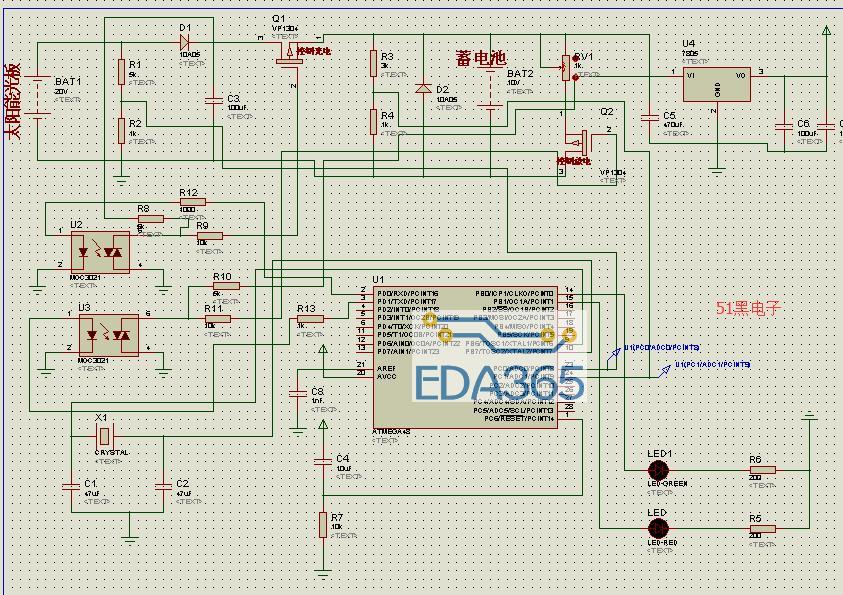
(1)供电模块。供电部分采用开关电源技术,采用开关电源可以解决传统变压器所带来的问题,整个设计可变得简洁;供电效率高,且稳定;并可减少系统结构体积。由于传统的基极驱动方式会将普通NPN型开关晶体管的安全工作电压限定在BVceo,而采用射极驱动的方式,可将安全工作电压从Vceo扩大到Vcbo,由于BVcbo>BVceo,即可改善NPN型晶体管的安全工作范围,对市电为220 V的电网电压可用普通的NPN型功率开关管。该电路接通交流220 V经整流桥后,形成直流电压,R2为启动电阻,开关管用NPN管,输出电流及输出电压信号通过光隔U3反馈至射极驱动芯片U2,U2根据信号调节控制开关管的占空比,使得输出保持稳定。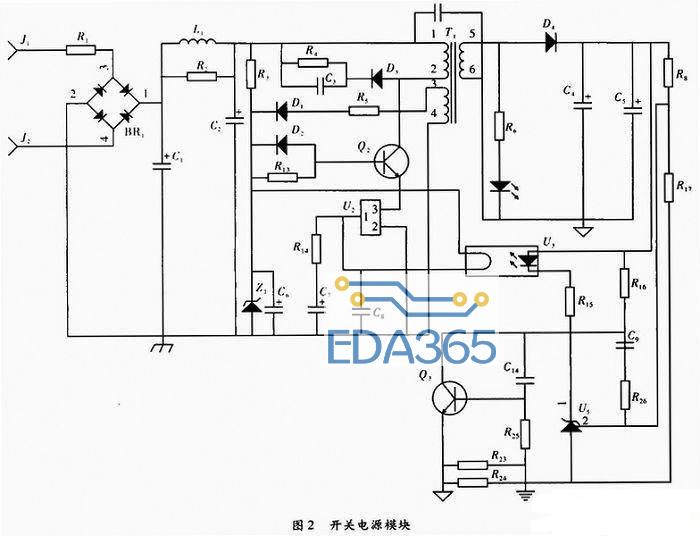
(2)采样模块。采样部分采用DS18B20,其为美国Dallas生产的一线可编程数字温度传感器。它不同于传统的模拟温度传感器,其可产生对应温度的数字信号,与主控芯片只需单线通信,使得系统结构简单可靠。由于通信线为双向输入输出的OC门,因此需外加一个上拉电阻到VCC。DS18B20与MCU通信的时序要求严格,所以在采样过程中有必要关闭MCU的中断功能,防止外部干扰导致采集到错误数据。
(3)控制模块。控制部分南同态继电器(SSR)实现弱信号对强电的控制。由于固态继电器内部光耦合器的应用,使其控制信号所需的功率较低,且所需工作电压与TTL,CMOS等常用电平标准兼容,可实现直接连接。SSR工作时无机械动作,其具备了传统的“线圈-簧片触点式”继电器(MER)所没有的优点,即工作可靠性高,寿命长,此外,SSR还具有可承受比额定电流高约10倍的浪涌电压的特点。考虑到51系列单片机IO口驱动能力较弱,在原理图设计上需要外加PNP开关管,如图3所示。
(4)算法模块。热电阻丝具有过冲过冷现象,采用软件的PID算法可以弥补硬件部分的不足。PID算法是一种比例、积分、微分并联应用广泛的一种模糊控制算法。PID算法的数学模型可用下式表示

其中,Kp为比例系数;Ti为积分系数;Td为微分系数;e(t)为采样值与目标值的偏差。比例部分由式Kp*e(t)表示。若Kp越大,则过渡过程越快,也易产生振荡。因此Kp选择恰当,才能起到快速过渡且又稳定的效果。积分部分为 。从表达式可知,只要存在偏差,则积分部分的控制作用就会不断增加,只有在偏差部分e(t)=0时,积分表达式才会为一个常数。其中积分时间Ti对积分控制的影响较大。Ti越大时,积分效果越弱,消除偏差需要的时间也越长。Ti越小,则积分效果较强,消除偏差需要时间也越短,但是容易在消除过程中产生振荡。
。从表达式可知,只要存在偏差,则积分部分的控制作用就会不断增加,只有在偏差部分e(t)=0时,积分表达式才会为一个常数。其中积分时间Ti对积分控制的影响较大。Ti越大时,积分效果越弱,消除偏差需要的时间也越长。Ti越小,则积分效果较强,消除偏差需要时间也越短,但是容易在消除过程中产生振荡。
微分部分表达式为
微分部分的作用为抑制偏差变化。Td越大,则抑制能力较强;Td越小,则抑制能力较弱。显然微分部分对系统的稳定性有较大的作用。
由于计算机无法像模拟控制那样连续输出控制量,进行连续控制。所以上式需进行离散化处理。离散化的思路为:以T作为采样周期,将连续时间t分为k个采样周期,即t=kT,将t代入式(1)可得到离散PID表达式
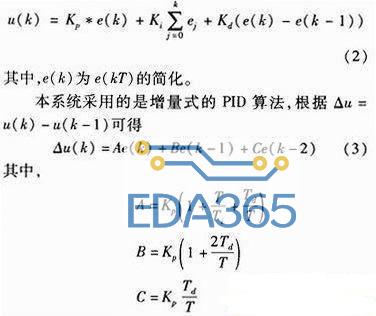
采用增量式PID算法的优势在于可减少计算机的计算任务,并且增量式算法只取决于目前时刻,上一时刻,上上时刻的值,对起始参数不敏感。
3个系数的取值取决于实际经验,为达到较好的控制效果,因此在各温度区域由实验测取了最佳PID控制参数值。系统PID算法流程如图4所示。
由图4可知,若输出值为x,则2 s内的需加热时长为x×20 ms,不加热时长为(2 000-x·20)ms。

(5)PCB设计。本着强电和弱点,模拟信号与数字信号需要分开的原则。在PCB设计时采取以下措施:
1)由于采用开关电源供电,因此需注意将高频高压部分和低压直流部分隔离开。
2)系统对噪声较敏感,由于数字器件,尤其是MCU在开关动作时会引起电流变化,从而导致电压噪声,因此需在走线上用星型走线的拓扑结构,对敏感器件单独供电。
3)数字地需要进行大面积铺地处理,并且每个器件都要单独接一个0.01μF的高频退藕电容,在大规模数字器件上(例如MCU),需要外加一个47μF的电解电容抑制干扰。模拟部分和数字部分进行隔离,即在合适的地方与数字地单点连接。
3 试验结果
(1)设计要求。
1)从室温开始加热至40 ℃要求控制在30 min以内。
2)开始PID控制以后,水温的波动范围需要在目标温度±0.5℃以内。
(2)实验数据。
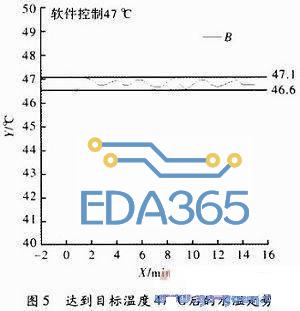
根据设计要求,目标温度定为47℃,从46.5℃开始根据PID算法控制,稳定后水温变化范围应在±0.5℃之内。
从室温下开始加热,水温上升平稳,每一分钟约上升0.7 ℃,如表1所示。
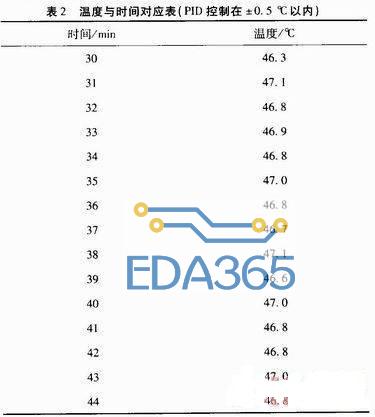
到达47℃后,水温被控制在46.5~47.5℃之间,如表2及图5所示。
4 结束语
此足浴器采用廉价的AT89C2051,并充分运用了其所有资源,两组IO引脚的其中11个引脚被用作LED数码管显示温度。剩下5个引脚分别作为继电器控制引脚、复位按键、DS18B20温度采集接口及两个温度调节按键。并用PID算法解决了热电阻过冲过冷的问题,减少了硬件需求,从而降低了成本。经实验证明,此控温系统运行稳定,且精度较高。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 MSP430F5529 上手小例程2
MSP430F5529 上手小例程2





 APP下载
APP下载 登录
登录







