×


2 MiniGUI的程序开发和移植
将MiniGUI及应用程序移植到目标机上需要经历编写相应的驱动程序、交叉编译MiniGUI及应用程序、安装MiniGUI到目标系统、在目标系统上运行MiniGUI应用程序等几个步骤。
MiniGUI程序是建立在MiniGUI和ANSIC库之上,所以程序的编写要按照MiniGUI的程序框架来定,并通过调用ANSIC库以及MiniGUI自身提供的API函数来实现。MiniGUI程序的入口点: int MiniGUIMain(int argc,const cha r * argv [ ]) 。其风格类似于Win32 ,也是基于窗口、事件驱动编程。事件通过消息机制传递,当事件发生时,MiniGUI将事件转换为一个消息,并将消息发送到MiniGUI应用程序的消息队列之中。窗口过程函数是MiniGUI应用程序必不可少的函数,用于接收和处理消息,是一个回调函数,由MiniGUI调用,在应用程序中不能直接调用,其函数原型如下:static int WindowProc (HWND hWnd, int message, WPARAM wParam,LPARAM lParam)。每个MiniGUI应用程序的初始界面一般都是MiniGUI主窗口,然后在主窗口的基础上再建立子窗口或对话框等。主窗口使用CreateMainWindow函数实现,在这个函数里可以设置主窗口的风格、大小、句柄、标题以及窗口过程函数等[6,8-9]。
本文有两个显示界面,分别对应流程图里面的子程序1和子程序2。应用程序流程图如图2所示。
本文采用arm-linux-gcc-3.4.3交叉编译器对驱动程序和应用程序进行编译。安装交叉编译器步骤:将交叉编译器安装包arm-linux-3.4.3.tar.bz2复制到当前目录下,进行解压安装并指定安装路径:#tar xjvf arm-linux-3.4.3.tar.bz2 –C /usr/local/arm。为了便于使用,安装完毕后,通常都将交叉编译器的路径添加到系统的搜索路径中。这样要编译文件时就很简单,不用每次都指定路径,系统会自动搜索。在这里介绍的一种方法是修改/etc/profile文件:打开/etc/profile文件,在最后一行添加pathmunge /usr/local/arm/3.4.3/sbin,保存退出,在终端输入执行:#. Profile(“点+空格+文件名”)。可通过在终端输入:arm-linux-gcc–v 检验用户编译器版本。arm-linux-gcc编译出来的程序,不能在PC机上运行,必须下载到ARM系统中才能运行。
MiniGUI在Linux系统中有两种运行模式:fbcon(Frame Buffer Console)和qvfb(Qt Virtual Frame Buffer)。fbcon在控制台下运行,这种模式下不能开Linux的X图形界面。qvfb则是带帧缓冲的虚拟控制台,MiniGUI程序在qvfb中运行就像图形界面下的终端(Terminal)中运行命令一样。通过对gal_engine赋值来设置运行模式。
3 信号采集电路
CAN总线的智能节点一般由主控制器、CAN总线控制器、CAN总线驱动器以及具体的功能单元组成。主控制器用来通过访问CAN总线控制器来实现对CAN总线的访问。CAN总线控制器实现CAN协议的数据链路层和物理层功能,对外具有与主控制器和总线驱动器的接口功能。CAN总线驱动器提供CAN总线控制器与物理总线之间的接口。[page]
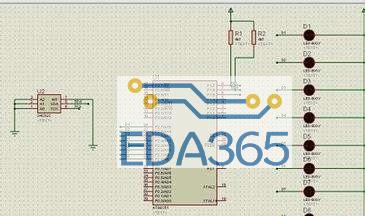
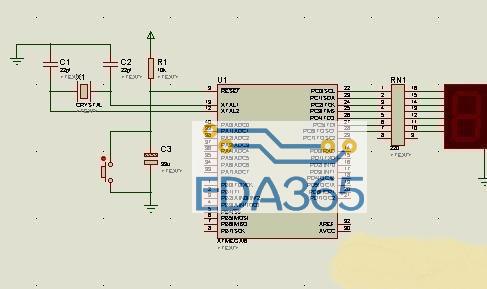
本文选用Microchip公司生产的MCP2515作为CAN总线控制器。MCP2515是一款独立的CAN协议控制器,完全支持CAN 2.0B技术规范。MCP2515与主控制器的连接是通过标准串行外设接口SPI(Searial Peripheral Interface)实现的。主控制器选择了Microchip公司的PIC16F913,该单片机为高性能的RISC CPU,内部具有4 KB的可编程可擦除的Flash存储器、256 B的RAM、256 B的EEPROM,带有标准的SPI接口,也能够方便地和CAN总线控制器MCP2515进行连接。CAN总线驱动器选择Microchip公司的MCP2551,是一个可容错的高速CAN器件[4,10]。数据采集用的CAN总线接口电路如图3所示。
4 CAN总线驱动程序的方案设计与实现
设备驱动程序是介于硬件和Linux内核之间的软件接口,是一种低级的、专用于某一硬件的软件组件。设备驱动也可以理解为操作系统的一部分,对于一个特定的硬件设备来说,其对应的设备驱动程序是不同的,比如网卡、键盘、鼠标、显卡、电位器、电机等。操作系统本身没有对各种硬件设备提供持久不变的“驱动设备”,没有驱动,操作系统就控制不了底层的设备,对于操作系统来说,挂接的设备越多,需要的设备驱动程序也越多。
在Linux操作系统中,把所有外设都当成文件看待,使用操作文件的方法来操作设备,通过驱动程序,Linux操作系统才能以文件夹的方式来管理设备。因此驱动程序的编写开发具有十分重要的地位。Linux设备驱动程序运行在Linux内核空间,是Linux内核中联系硬件设备和应用程序的桥梁。Linux系统硬件、设备驱动和应用程序的关系如图4所示[7]。
MagicARM270实验箱采用SJA1000 CAN控制器扩展了1路CAN接口,SJA1000是PHILIPS公司经典的CAN控制器,支持CAN 2.0 A、B协议。结合应用程序、驱动程序、内核程序,CAN驱动流程图如图5所示。
5 测试结果与验证
选取广州致远电子有限公司生产的Magic ARM270实验箱进行仿真[2]。通过
CAN总线实现汽车上各种信息的采集和测量,并将采集的结果送到ARM进行处理,最后通过TFT显示出来,设置CAN总线传输速度波特率为125 KB/s,图6所示为捕捉的一个界面。
随着信息技术的快速发展,现场总线技术在汽车上得到了越来越多的应用。本文在测试系统下采用CAN总线接口提取车速、发动机转速、机油压力、油量、水温、传动箱压力及其他车况等信息。实验表明采用虚拟仪表技术完全能够满足车辆运行参数和状态显示的要求,可扩充性好,配置方便。
关键字:ARM+Linux架构 CAN总线 MiniGUI 虚拟仪表
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 单片机中高阻态的实质及意义
单片机中高阻态的实质及意义





 APP下载
APP下载 登录
登录







