×


做该设计的初衷是为自己的毕设打基础,因为我的毕设要做一个探测机器人,需要对某一地区的各种环境参数进行检测,然后通过WIFI返回到上位机。所以为了搞懂温度传感器以及练习上位机的设计,花了几天时间做了一个很简单的采集系统。今天把它拿出来跟各位小伙伴们分享,希望对各位有所帮助,同时也希望大佬们指出不足,起到一个相互学习,相互促进的作用。该系统原理是:51单片机把ds18b20传感器将采集到的温度值(十六进制)通过串口发送到labview,labview对单片机发来的数据做简单的处理然后显示。
上位机界面
上位机(接受程序)
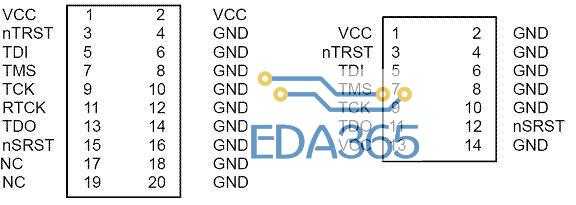
简单的硬件连接
数据纪录
串口部分:
void main()
{
if(flag==1||flag1==1)
{
S=test/10;
Y=test%10;
ES=0;
flag=0;
SBUF=S;
while(!TI);
TI=0;
SBUF=Y;
while(!TI);
TI=0;
if(temperature!=test)
flag1=1;
ES=1;
}
}
//串口中断
void ser() interrupt 4
{
if(RI==1)
{
RI=0;
a=SBUF;
if(a=='1') P1=0x55;
if(a=='0') P1=0xaa;
flag=1;
}
}
温度采集部分:
#include
#include "ds18b20.h"
#include "delay.h"
sbit DQ=P2^2; //温度传感器 I/O 口
uchar reset_ds18b20()
{
uchar presence;
DQ=0;
delay_ds18b20(29); //延时480 - 960 us
DQ=1;
delay_ds18b20(3); //延时 15 - 60 us
presence=DQ;
delay_ds18b20(25); //延时 60 - 240 us
return(presence);
}
uchar read_bit_ds18b20()
{
uchar i;
DQ=1;
delay_ds18b20(1);
DQ=0;
//delay(1); //延时 15us 也可以不延时
DQ=1;
//delay(3); //延时 1 - ∞ us
for(i=0;i<3;i++);
return(DQ);
}
void write_bit_ds18b20(uchar dat)
{
DQ=0; //置0 无需延时
if(dat==1)
DQ=1;
delay_ds18b20(1); //延时 60 - 120 us
DQ=1;
delay_ds18b20(1); //延时 1 - ∞ us
}
void write_byte_ds18b20(uchar dat)
{
uchar i,j;
for(i=0;i<8;i++)
{
j=((dat>>i)&0x01);
write_bit_ds18b20(j);
//delay(1); //延时 1 - ∞ us
}
}
uchar read_byte_ds18b20()
{
uchar dat=0;
uchar i;
for(i=0;i<8;i++)
{
if(read_bit_ds18b20())
dat|=0x01<
//delay(1); //延时 1 - ∞ us
}
return(dat);
}
int read_temp_ds18b20()
{
uchar templ=0,temph=0;
int temp=0;
reset_ds18b20();//复位
write_byte_ds18b20(0xcc); //跳过ROM
write_byte_ds18b20(0x44); //跳过温度采集
delay_ds18b20(10); //750ms
reset_ds18b20();
write_byte_ds18b20(0xcc); //跳过ROM
write_byte_ds18b20(0xbe); //准备好数据(开始温度转换采集)
templ=read_byte_ds18b20();//读低字节温度值
temph=read_byte_ds18b20();//读低字节温度值
temp=(templ+(temph*256));
return(temp);
}
关键字:51单片机 温度采集系统 Labview 上位机『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 STM32单片机的复用端口初始化的步骤及方法
STM32单片机的复用端口初始化的步骤及方法







 APP下载
APP下载 登录
登录







