
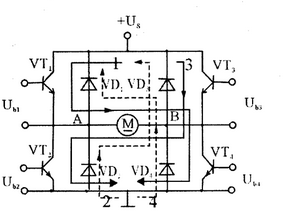
可逆PWM变换器的主电路有多种结构形式,而H型PWM变换器在直流脉宽调速系统中最为常用,它是由4个三极电力晶体管VT, VT2, VT.和VT,以及4个续流=极管VD,,VD2,VD3和VD,构成的桥式电路(如图1所示)。在桥式电路的一个对角线上接电源Us,在另一一对角线上接直流电动机M的电枢,而U,Ub2,! B8和U分别为4个三极管的基极驱动电压,由于基极驱动电压的极性和大小不同,在H型变换器中又分类出三类控制方式, 分别为双极式控制、单极式控制和受限单极式控制。在不同的控制方式下,调速系统的电压、电流各不相同,使电机的运行特性和调速系统的调速性能也不同。而在直流调速系统中对电机运行特性影响最大的是电流。电流的大小、方向、连续性直接影响电机的运行性能,所以应对可逆PW M变换器中的电流进行分析,从而掌握电机的运行特性,以便采用合适的控制方式来确保调速系统的调速性能。
可逆PWM变换器是利用驱动电压正、负脉冲的宽窄对电动机的正反转的控制。当正脉冲较宽时,ton>T/2,则输出电压的平均值为正,电动机正转,反之则反转;如果正、负脉冲相等,ton=T/2,平均输出电压为零,则电动机停止
晶闸管—电动机系统中,抑制电流脉动可采取的措施是:增加整流电路相数、采用多重化技术、设置平波电抗器 2、位置随动系统一般由五个部分组成,这五个部分分别是:位置传感器、电压比较放大器。电力电子变换器、伺服电机和减速器与负载。
其屯路如圏1所示, 4个三板晶体管基板駆幼屯圧的美系内: U,=Us,U=U=-U,如圏2(a)所示。在晶体管不承受反圧的情况下, VT, 和VT,同吋尋通和美断,VT,和VT,同吋劫作, 且在- -个幵美周期中VT,和VT,与VT,和VT,西組晶体管交替尋通和美断。在屯劫机的灸載較重,平均灸載屯流較大吋,在Oくt
Ub2,Up为正,但由于电枢电感释放储能,使电流继续由A向B流过电枢,即电流id经二极管VD,和VD,由回路2续流(如图1)。电流在VD,和VD3上产生的正向压降使VT,和VT的c-e极承受反压而不能导通,此时Up=-U,所以在一个周期中,变换器输出电压UR有正负极性变化,即为“双极性”(电枢电流如图2(b)中ig所示)。当电动机负载较轻时,在t≤t
其中ρ=2-°p -1 为双极式PWM00电压的占空比,其范围为-1≤ρ≤1。
由此可知改变ρ即可调速,ρ为正值电动机正转,p 为负值电动机反转,ρ=0电动机停止运转。 『本文转载自网络,版权归原作者所有,如有侵权请联系删除』
相关链接
简述pwm变换器的作用
基于IR2110的H桥可逆PWM驱动电路应用








 热门文章
更多
热门文章
更多

 IDT 推出已通过验证用于英特尔凌动的电源解决方案
IDT 推出已通过验证用于英特尔凌动的电源解决方案







 APP下载
APP下载 登录
登录







