×


电源启动过程中的瞬时电流冲击非常大,会严重影响电源和设备的使用寿命。一种好的控制方法用于控制启动电流以减小其危害,从而在启动过程中不会产生瞬时冲击,并且可以连续变化,这是电源启动控制中的关键步骤。电源的软启动模式是控制输出电压和电流以逐渐增加负载电压和电流。对于线性时不变模型的控制对象,可以适当调节PID参数以获得满意的控制效果,从而可以解决电流过大的问题。 PID控制可以很好地解决启动过程中的振动和过冲问题,可以更好地保护电源,启动可靠,稳定性强。使用单片机作为控制器,编程灵活,性价比高,易于实现人机界面管理。使用软件来调整系统的非线性度,以减少测量值和设定值之间的偏差。电源电压或电流的波动,电路组件的老化,环境温度等因素都会影响电源的稳定性。为了稳定地控制电源的电源,该解决方案使用了基于单片机的高速AD和DA数据采集系统,并使用PID算法来实现大功率电源的软启动。该系统使用PID电压采样反馈来控制输出电流的恒定和高精度,更快的响应速度,更好的灵活性和更高的稳定性。
1 大功率精密恒流源的实现
1.1 电源系统设计
以单片机为核心, 完成以下功能: 处理键盘输入数值, 包括电路预定值和“+” 、“-” 步进; 控制数LCD 显示预定值和实际值; 控制ADC 和DAC; 根据得到的反馈信号通过程序控制算法进行偏差值补偿。由于运放OPA549 一路受D/A 转换器控制, 调整运放OPA549 输入端电压, 一路为比例放大电路。当DAC 输出预定值或步进值后, 电流源的输出在0 ~8 A 范围内变化。输出电压经与负载串联的小电阻采样后, 送入ADC, 采样值与预定值在单片机内部进行计算、比较输出控制信号,对偏差值进行补偿。利用软件调整系统的非线性, 以降低实测值与设定值之间的偏差。
1.2 电源电路设计
(1) 数控部分核心
采用单C8051F , 控制数控直流源的键盘和显示, 与D/A 转换器和A/D 转换器控制输出电流。A/D 转换器的基准电压由专门±9 V 电源供电,D/A 转换器的基准电压由+20 V 电源供电, 由单片机送出数据经DAC 转换输出控制电压。
(2) 运放OPA549 放大电路电流源。
OPA549 是BB 公司新推出的一种高电压大电流功率运算放大器。它能够提供极好的低电平信号、输出高电压、大电流, 可驱动各种负载。该器件的主要特点: 输出电流大, 连续输出电流可达8 A, 峰值电流可达10 A; 工作电压范围宽, 单电源为+8 V~+60 V, 双电源为±4 V~±60 V; 输出电压摆动大;有过热关闭功能, 电流极限可调; 有使能及禁止功能; 有过热关闭指示; 转换效率( 压摆率) 最高为9 V/μs ; 工作温度范围为-40℃~+85℃。该器件主要应用于驱动工业设备、测试设备、电源、音频功率放大器等大电流负载。
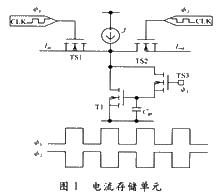
在该电源系统中, 主要为负载提供大电流, 采用PID 控制算法控制负载的发光强度。输入为单片机经DAC输出的控制电压, 一路为比例放大电路, 如图1 所示增益G=1+R3/R2.电流型DAC 通过R1 转换成电压, 控制OPA549 。输出电流经采样电阻转换为采样电压, 送入A/D 转换器反馈至单片机进行偏差值补偿。
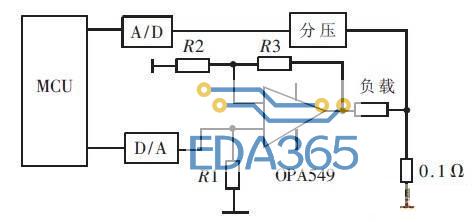
图1 OPA549 构成可调大电流恒流源
(3) 散热及抗干扰。
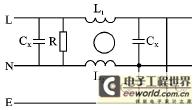
OPA549 大功率管工作时产生恒定的大电流, 功耗较大, 产生的热量较多, 散热成为该电源急需处理的问题。一般的轴流风扇内部电机置有脉冲驱动电路, 驱动时, 脉冲成分很容易直接顺电机电源线“ 外溢” , 干扰其他电器设备。视频设备上干扰表现为横通斜线, 音响设备上产生噪音。为此, 安装大面积的铜散热片, 同时用风扇对设备中的电子元器件强制散热。安装风扇时, 需要在风扇电机电源线上串绕一只高频磁环以抗干扰。串绕磁环有效滤除这些干扰成分, 一般只需绕上1~3 匝即可。
2 PID 控制算法
系统软启动的控制功能通过比例积分微分控制器实现。通过比较给定信号与反馈信号的偏差, 并进行比例、积分、微分等运算进行控制, 是技术较成熟、应用、广泛的一种控制方式。其结构简单、灵活性强、系统参数调整方便, 不需要求出模型。
PID 控制原理如图2 所示。PID 控制是一种线性调节器, 它把设定值W 与实际输出值相减, 得到控制偏差e 。偏差值e 经比例、积分、微分后通过线性组合构成控制量U, 对对象进行控制。其中比例调节器起到基础调节作用, 主要对控制系统的灵敏度和控制速度有影响。积分调节器可以自动调节控制量, 消除稳态误差,使系统趋于稳定。微分调节器可以减小超调, 克服振荡, 同时加快系统的稳定速度, 缩短调整时间, 从而改善系统的动态性能。

图2 PID 控制原理图
PID 控制器的输出与输入之间的关系可表达为:

式中: Ti为积分时间常数; Td为微分时间常数; Kp为比例系数; Ki为积分常数, Ki=Kp/Ti ; Kd为微分常数,Kd=Kp/Td.
系统启动时间较短, 启动电压、电流较大, 负载所承受的冲击也较大, 致使启动阶段负载的动负荷峰值远远大于正常运行时的负荷, 容易造成负载的损坏。为解决此问题, 设计了一种新型的PID 控制软启动电源系统, 主要由电源、大电流恒流源、输出大电流端采样和控制系统组成, 并完成了实验室内的试验。当电源启动时, 首先由单片机系统给定设定电压、电流或功率。PID软启动是按负载线性上升的规律控制输出。在负载电压线性增加的过程中, 如果电流超出了所限定的范围, 则马上投入电压闭环, 使电流值限定在所设定的范围内后, 再线性逐渐增加电压至额定值, 系统的光强也由零逐渐增大, 完成启动过程。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

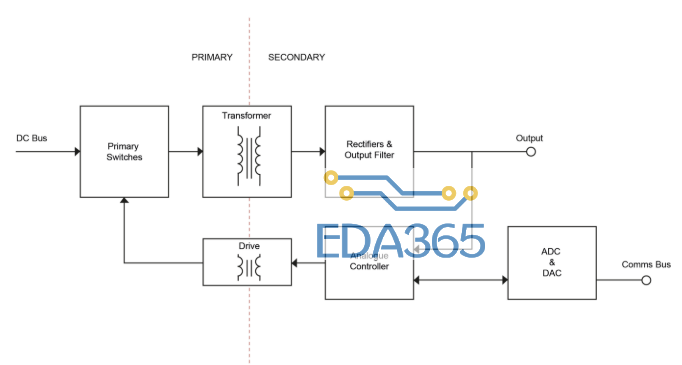
 设计成败决胜于选择:数字电源or模拟电源
设计成败决胜于选择:数字电源or模拟电源





 APP下载
APP下载 登录
登录







