
直流电机的电磁转矩是电枢电流的函数,电流受到转速,负载转矩等多种因素的影响,是一个复杂的转换过程。因之,对直流无刷电机控制的关键环节在于电流环的控制,即电流闭环控制和电流变化率控制。不但要满足精度的要求,还要满足速度的要求。特别是电流变化率的控制,要求响应速度非常快才行。
在一些特殊的应用环境中,如电梯、起重、曳引等,要求驱动、拖动系统的起步、停止及运行过程非常平稳,以增强舒适感和安全性。图1是一个典型的闭环控制系统,图中Vgn是中心控制单片机给定转速,Vfn是反馈转速,两者之间的差值经速度调节器产生给定电流信号Vgi,该闭环称为速度调节环。Vgi和霍尔电流传感器HL检测出的电流Vfi求差后进入电流调节器LT,该调节器是在最大电流限制下进行调节的,输出的波形控制信号Vgb在电流变化率控制电路LBT的控制下产生驱动IGBT的PWM脉冲。电流变化率信号是将来自HL的电流信号经微分电路LD微分后产生的,在LBT中对Vgb进行调整,限制电流变化率的增长。在图l所示的控制系统中,虚线框内部分利用UC3846进行了设计。下面介绍一下设计原理。
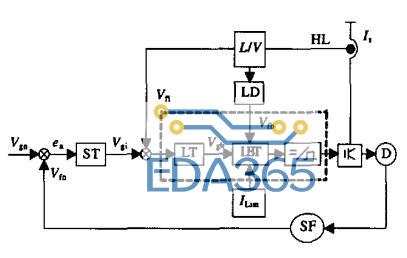
图1 闭环控制框图
电流型控制器除了要有电压型PWM控制器的全部功能外,还需要有电流检测环节,检测点可以根据需要任意选择,例如开关管电流、电感电流或由HL传感器送来的总输出电流等。下面以UC3846为例说明其工作原理。图2示出了该芯片的内部结构。图中不同于电压型控制器件之处是设置了一个电流测定放大器,增益为3。E/A放大器为误差放大器,输出经过二极管和0.5v偏压后送至比较器反向端,同相端为三倍后的电流测定信号。电流测定放大器输出由内电路限定在3.5V以下,因之,电流测定信号最大电压值被限定在3.5/3=1.2V之内。根据1.2V可选择电流测定环节参数。对于电流型控制,为了保证输出电流恒定,不受占空比d的影响,就必须进行斜坡补偿。其方法是:在电流检测放大器输入端(4脚)或误差放大器输出端(7脚)叠加一个从振荡器波形派生的三角波形与电感电流波形之和,即完成了斜坡补偿,其幅值应大于电流波形下斜坡的l/2。
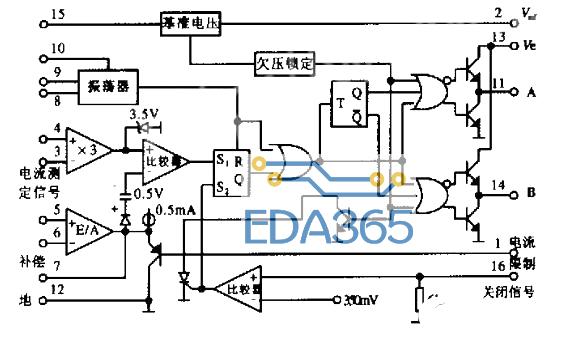
图2 UC3846的内部结构
图3给出了UC3846内部局部和外电路连结原理图。图中S为PWM寄存器,有两个置位端S1、S2,均可使y.。为高电平,封锁PWM输出。在设计中,用sl接受A,的输出,当输出电流I,大于给定值时,A3输出为高电平,从而形成PWM的后沿。S2端接受由外电路形成的两个控制信号K1、K2的控制。其中K1用作电路关断,K2为输出检测电流I经微分电路的输出,其作用是当电流变化率超过一定值时,关闭脉冲输出。图中R5C.构成斜坡校正网络,对输出电流进行校正。下面分别讨论电流环和电流变化率环的工作原理。
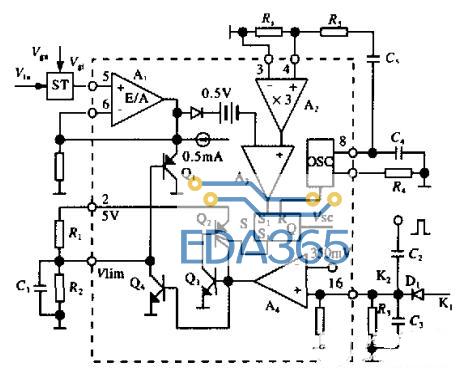
图3 部分uc3846内部结构与外部联线图
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 浅谈IP技术在网络电视中的应用
浅谈IP技术在网络电视中的应用







 APP下载
APP下载 登录
登录







