×


特征
•高效率功率级(高达96%),具有低RDS(on)MOSFET(TJ=25°C时为80 mΩ)
•工作电源电压高达50 V(最大65 V绝对值)
•每个装置10 A连续输出电流和24 A峰值电流
•PWM工作频率高达500 kHz
•集成自保护电路
•可编程循环限流保护
•每个半桥的独立电源和接地引脚
•智能闸门驱动及防交叉导电
•不需要外部缓冲器或肖特基二极管
•热增强DKD(36针PSOP3)封装
应用
•直流和无刷直流电动机
•三相永磁同步电动机
•机器人与触觉控制系统
•执行机构和泵
•精密仪器
•TEC驱动程序
说明
DRV8402是一个高性能,集成双全桥电机驱动器与先进的保护系统。由于低RDS(on)和智能门驱动器设计,这种电机驱动器的效率可以达到96%,这使得可以使用更小的电源和散热器,是一个很好的节能应用的候选。该设备需要两个电源,一个用于GVDD和VDD,一个用于PVDD,一个高达50V。DRV8402能够驱动5A连续均方根电流和12A峰值电流,每个全桥具有低闲置功耗。它也可以用于高达10A的连续电流和24A的峰值电流并联全桥运行。
DRV8402可以在高达500千赫的开关频率下工作,同时仍然保持精确的控制和高效率。它还拥有集成在芯片上的创新保护系统,保护设备免受可能损坏系统的各种故障条件的影响。这些保护措施包括短路保护、过电流保护、欠压保护和两级热保护。DRV8402有一个限流电路,可防止设备在负载瞬变(如电机启动)期间停机。可编程过电流检测器允许可调的电流限制和保护水平,以满足不同的电机要求。
DRV8402每个半桥都有独特的独立电源和接地引脚,这使得通过外部并联电阻器提供电流测量成为可能,并支持具有不同电源电压要求的多个电机。
简化应用程序图

系统框图

典型特征



操作理论
电源
为了帮助系统设计,除了功率级电源之外,DRV8402只需要12伏电源。内部电压调节器为数字和低压模拟电路提供合适的电压水平。此外,所有需要浮动电压供电的电路,例如,高压侧栅极驱动器,都由只需要几个外部电容器的内置自举电路来容纳。
为了提供电气特性,包括栅极驱动和输出级的PWM信号通路被设计成相同的、独立的半桥。因此,每个半桥都有独立的栅极驱动电源(gvd_X)、引导引脚(BST_X)和功率级电源引脚(PVDD_X)。此外,还提供了一个附加管脚(VDD)作为所有公共电路的电源。尽管由相同的12-V电源供电,但建议使用1–10Ω电阻器将GVDD_X引脚与印刷电路板(PCB)上的VDD分开。应特别注意将所有去耦电容器尽可能靠近其相关引脚。一般来说,必须避免电源引脚和去耦电容器之间的电感。
对于正常工作的自举电路,必须在每个自举引脚(BST_X)和功率级输出引脚(OUT_X)之间连接一个小型陶瓷电容器。当功率级输出较低时,自举电容器通过连接在栅极驱动电源引脚(gvd_X)和自举极之间的内部二极管充电别针。什么时候功率级输出很高,自举电容器的电势高于输出电势,因此为高压侧提供了合适的电压供应门驱动器。在PWM开关频率范围为25 kHz至500 kHz的应用中,建议使用尺寸为0603或0805的47 nF陶瓷电容器作为自举电源。这47纳伏电容器确保了足够的能量储存,即使在最小的脉宽调制占空比下,也能保持高侧功率级场效应晶体管在剩余的脉宽调制周期内完全开启。在开关频率低于25kHz的应用程序中,可能需要增加自举电容器的值。
应特别注意功率级电源;这包括元件选择、PCB放置和布线。如图所示,每个半桥都有独立的功率级电源引脚(PVDD U X)。最佳电气性能合规性和系统可靠性,重要的是每个PVDD_X管脚与陶瓷电容器分离,尽可能靠近每个电源管脚。建议遵循EVM板中DRV8402的PCB布局。
12V电源应来自低噪声、低输出阻抗的电压调节器。同样,假设50V功率级电源具有低输出阻抗和低噪声。由于内部通电复位电路的便利,电源顺序并不重要。此外,DRV8402完全防止由于寄生栅极充电而导致的错误功率级开启。因此,电压供应斜坡率(dv/dt)在规定范围内是非临界的(见本数据表的推荐运行条件部分)。
系统上电/断电顺序
能量提升
DRV8402不需要通电顺序。H桥的输出保持高阻抗状态,直到栅极驱动电源电压(GVDD_X)和VDD电压高于欠压保护(UVP)电压阈值(见本数据表的电气特性部分)。虽然不是特别要求,但建议在给设备通电时将RESET_AB和RESET_CD保持在低状态。这允许内部电路通过使半桥输出的微弱下拉(半桥模式除外)对外部自举电容器充电。
断电
DRV8402不需要断电顺序。只要栅极驱动电源(GVDD U X)电压和VDD电压高于UVP电压阈值(请参阅本数据表的电气特性部分),该设备就保持完全运行。虽然没有特别要求,但在断电期间保持RESET_AB和RESET_CD低是一个好的做法,以防止在此转换期间出现任何未知状态。
错误报告
故障和OTW引脚均为低电平开路漏极输出。它们的功能是向PWM控制器或其他系统控制设备发送保护模式信号。
任何导致设备关闭的故障都由故障引脚变低发出信号。同样,当器件结温超过125°C时,OTW变低(见表1)。

无论是复位故障还是复位故障,都必须注意u是高电平故障。为了正确报告错误,请在正常操作期间将RESET AU AB和RESET U CD设置为高。
TI建议使用系统微控制器监控OTW信号,并通过降低负载电流来响应OTW信号,以防止设备进一步加热导致设备过热停机(OTSD)。
为了减少外部元件的数量,在故障和OTW输出端都提供了一个3.3V的内部上拉电阻。5V逻辑的电平符合性可通过将外部上拉电阻器增加到5V来获得(有关进一步的规范,请参阅本数据表的电气特性部分)。
设备保护系统
DRV8402包含先进的保护电路,经过精心设计,有助于系统集成和易用性,以及保护设备不因短路、过电流、过热和欠压等多种故障条件而发生永久性故障。DRV8402通过立即将功率级设置为高阻抗(Hi-Z)状态并断言故障引脚低,来响应故障。在过流或过热以外的情况下,当故障条件消除或栅极电源电压升高时,装置自动恢复。为了获得尽可能高的可靠性,从过电流关机(OCSD)或OTSD故障中恢复需要在关机后1秒内对设备进行外部复位(参见本数据表的设备复位部分)。
自举电容器欠压保护
当器件在较低的开关频率下运行(例如,使用47 nF的自举电容小于20 kHz),自举电容器电压可能无法为高压侧栅极驱动器保持适当的电压水平。在这种情况下,启动一个自举电容欠压保护电路(BST_vp),以防止高压侧MOSFET的潜在故障。当自举电容器上的电压低于安全运行所需的电压时,DRV8402将启动自举电容器充电顺序(短时间关闭高压侧场效应晶体管),直到自举电容器正确充电以实现安全运行。当PWM占空比过高(例如高于99.5%)时,也可激活此功能。注意,如果输出端没有负载,引导电容器可能无法充电。
由于充电自举电容的额外脉冲宽度很短,因此在输出电感存在的情况下,由于额外电荷而引起的输出电流中断几乎可以忽略不计。
过电流(OC)保护该器件具有独立的、快速反应的电流检测器,在所有高侧和低侧功率级fet上具有可编程的跳闸阈值(OC阈值)。通过模式选择引脚有两种OC保护设置:循环循环(CBC)限流模式和OC闭锁(OCL)关闭模式。
在CBC限流模式下,探测器输出由两个保护系统监控。第一保护系统控制功率级以防止输出电流进一步增大,即,它执行CBC限流功能,而不是过早地关闭设备。这种特性可以有效地限制电机启动或瞬态过程中的励磁涌流,而不会损坏设备。在对电源短路和对地短路的情况下,限流电路可能无法将电流控制在适当的水平,第二个保护系统触发闭锁关闭,导致功率级设置为高阻抗(Hi-Z)状态。限流和过流保护分别独立于半桥A、B、C和D。
在OCL关闭模式下,循环电流限制和错误恢复电路被禁用,过电流情况将导致设备立即关闭。关机后,必须断言RESET_AB和/或RESET_CD,以在消除过电流条件后恢复正常运行。
为了增加灵活性,OC阈值可在有限的范围内使用连接在OC_ADJ引脚和AGND引脚之间的单个外部电阻器进行编程。有关编程电阻值和OC阈值之间的相关性的信息,请参阅表2。应注意的是,正常工作的过电流检测器假定在功率级输出端(至少2μH)存在适当的电感器。短路保护不直接在功率级的输出引脚上提供,而只在电感器之后提供。如果出于任何原因首选更小的电感器,建议使用OCL模式设置。

超温保护
DRV8402有一个两级温度保护系统,当装置结温超过125℃(标称值)时,该装置会发出一个激活的低报警信号(OTW);如果装置结温超过150℃(标称值),则装置将进入热停堆状态,导致所有半桥输出设置为高阻抗(Hi-Z)状态,故障被断言为低。在这种情况下,OTSD被锁定,RESET_AB和RESET_CD必须被断言为低。
欠压保护(UVP)和上电复位(POR)
DRV8402的UVP和POR电路在任何通电/断电和断电情况下完全保护设备。通电时,POR电路复位过电流电路,并确保当GVDD U X和VDD电源电压达到9.8 V(典型值)时,所有电路都能完全工作。尽管GVDD U X和VDD是独立监测的,但任何VDD或GVDD_X引脚上的低于UVP阈值的电源电压降会导致所有半桥输出立即设置为高阻抗(Hi-Z)状态,故障被断言为低。当自举电容器上的所有电源电压都高于UVP阈值时,设备自动恢复运行。
设备复位
提供了两个复位引脚,用于半桥A/B和C/D的独立控制。当reset U AB被断言为低时,半桥A和B中的所有四个功率级FET都被强制进入高阻抗(Hi-Z)状态。同样地,断言复位低迫使半桥C和D中的所有四个功率级fet进入高阻抗状态。
在全桥和并联全桥配置中,为适应切换启动前的自举充电,将重置输入设为低可使半桥输出的下拉能力较弱。在半桥配置中,弱下拉不被启用,因此,建议在复位为高电平时,首先在PWM输入端提供一个低脉冲,对自举电容器进行预充电。
断言复位输入低将删除故障输出上要发出信号的任何故障信息,即故障被强制高电平。
任何一个复位输入上的上升沿过渡允许设备在过电流故障后恢复运行。
不同模式操作
DRV8402支持三种不同的模式操作:
1、全桥(FB)模式
2、并联全桥(PFB)模式
3、半桥(HB)模式
在全桥和半桥模式下,PWM峎A控制半桥A,PWM峎B控制两个半桥B,等等。图6显示了全桥模式操作的应用示例。
在并联全桥模式下,PWM-A控制半桥A和半桥B,PWM-B同时控制半桥C和D,而不使用PWM-C和PWM-D引脚(建议接地)。桥A和桥B内部同步(即使在CBC期间),因此,作为桥C和D,输出A和输出B应该连接在一起,并且输出C和输出D应该在一个小的输出电感器之后连接在一起。图7显示了并行全桥模式连接的示例。
模式引脚配置为图6和图7中的CBC限流操作。
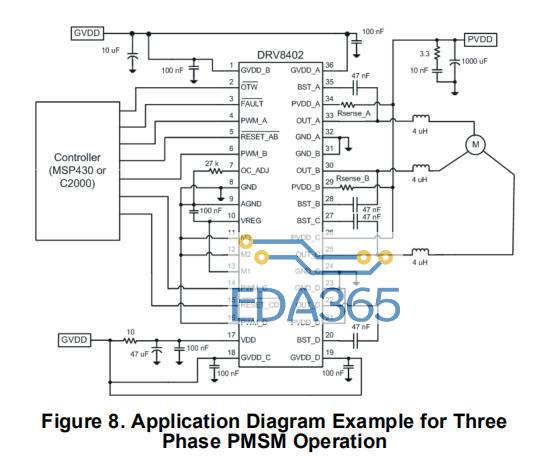
DRV8402也可用于三相永磁同步电动机(PMSM)应用。因为每个半桥都有独立的电源和接地引脚,所以可以在PVDD到PVDD_X或GND到GND_X之间插入一个并联电阻。建议在PVDD和PVDD_X之间安装一个高压侧并联电阻器用于差分电流传感,因为低侧传感上的高偏压可能会影响器件的运行。对于三相应用,建议使用OCL模式。图8显示了一个三阶段应用程序示例。
建议每个应用(图中未显示)靠近每个电源引脚的去耦电容器。


热信息
DRV8402提供的热增强封装设计为使用热界面化合物(例如北极银、TIMTronics 413、陶瓷热化合物等)直接与散热器连接。然后,散热器从集成电路中吸收热量并将其耦合到局部空气中。
热信息
RθJA是从接头到环境空气的系统热阻。因此,它是一个包含以下组件的系统参数:
•RθJA(从接头到外壳的热阻,或在本例中为热段塞)
•热油耐热性
•散热器热电阻
热润滑脂热阻可根据暴露的热段塞面积和导热脂制造商的面积热阻(以°C-in2/W或°C-mm2/W表示)。外露热段塞的近似尺寸如下:
•DRV8402,36针PSOP3……0.124 in2(80 mm2)
热垫的热阻被认为高于薄的热润滑脂层。热胶带的热阻甚至更高,根本不应使用。散热片热阻由散热器供应商预测,使用连续流动动力学(CFD)模型建模或测量。
因此,系统RθJA=RθJC+导热脂阻力+散热片阻力。
更多热信息,请参阅TI应用报告,IC封装热测量(SPRA953A)。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 示波器使用时要注意的19个问题
示波器使用时要注意的19个问题







 APP下载
APP下载 登录
登录







