APP下载
APP下载 登录
登录







导读:分享了一个基于PSoC4微控制器的智能承载平衡平台的完整设计,有各个模块的简单说明以及实物图片,希望大家喜欢。
智能承载平衡平台是一个自平衡系统,微控制器可以通过控制步进电机转动,从而控制伸缩杆来调节承载平台的倾斜角度。首先简单介绍一下这个系统,该系统由矩阵键盘、电源模块、PSOC4、LCD12864、舵机2个、亚克力板2块黑色、支架一套、角度传感器一个、语音模块组成。
可以任意设置平台倾斜的角度,只需使用按键输入你想设定的方向即可,平台会根据角度传感器才回来的值,自动进行调整。液晶会显示调整的时间,以及平台所处的角度和按键按下的值以及设定值。
具体参数如下:
- (1)能同时检测平台长边和宽边的倾角,并显示。
- (2)能设置平台沿宽边倾斜,倾斜度≤60°,精度<1°。
- (3)平台沿宽边在20°内倾斜时,能在15秒内调平,调平精度<1°。
- (4)能设置平台沿长边倾斜,倾斜度≤60°,精度<3°。
- (5)平台沿长边在20°内倾斜时,能在15秒内调平,调平精度<1°。
- (6)平台能承载500克重的物体,且可在平台上任意放置。
- (7)可设置沿任意方向倾斜,倾斜度≤60°,精度<1°。
- (8)平台沿任意方向在20°内倾斜时,能在15秒内调平,调平精度<1°。
系统框图
1.矩阵键盘
首先来说一下矩阵键盘,矩阵键盘采用4X4的矩阵键盘,我在使用PSOC4做矩阵键盘时耗了很多时间,我采用的反转法一直不行,后来在网站上看到外国人做的矩阵键盘我就采用了,实验了一番可以检测到按的是哪个键,但后来在系统联调的时候发现抖动很严重,一次触发会采到2个值,一直解决不掉,后来为了解决这个问题,我采用了延时的方法去抖,这种方法不是最好的,建议大家能从根本上解决问题。
大家注意到液晶显示中,第一行便是按键值,第二、三行便是角度传感器采回来的值,第四行便是调整时间的值
2.舵机
想必很多人接触过舵机,舵机其实就是利用电机做的,不过它能保持自己的位置不动,上传一个实物图给大家看看。只要使用PWM即可控制,当然想玩转舵机必须有它的相关参数,比如所需频率、扭矩以及响应速度等。我采用的周期是3ms,这个是在技术手册上看到的。
3.液晶模块LCD12864
显示模块采用了常用的LCD12864
4.亚克力板
加工了2块黑色亚克力板,黑色看起来更美观,所以选择黑色,在网上专门定做。
5.角度传感器
角度传感器采用MMA845X,没有采用I2C进行读取,因为我之前用I2C了,结果调试发现有个地方一直过不去,也就是死循环了,应该是某个地址发错了,由于时间比较紧,我就采用模拟I2C进行采集。
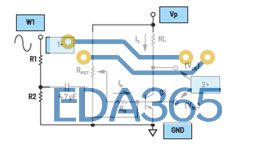
6.电源模块
电源模块传个电路图吧,没有拍实物的照片。
7.语音模块
语音模块采用三线串口方式,这个我之前玩过,所以不是很难,在淘宝网有卖的,使用很简单,只要时序正确就OK,所以传个实物图以及外围电路图吧
在这个系统中我使用了PWM 、Timer、LUT、ISR、CLOCK。在调试过程中我又使用UART作为串口,发送加速度传感器才回来的角度值。
整体电路图设计来张全家福
下面传一下我这个系统的整体照片
角度传感器在哪? 看到线了吧,嘻嘻原来藏在这了
大家发现小红板了吗?它就默默的在灯亮的地方
注意哦 键盘在水笔写的字那,被隐藏起来了,你有发现吗?
以上就是整个智能承载平衡平台的完整设计。








 热门文章
热门文章