APP下载
APP下载 登录
登录







MyriadX是一个视觉处理器,能够以超过30帧/秒的速度进行实时物体检测和立体深度。
目前正在制造一个多X系统模块(SOM),它允许将多X的能量嵌入到您自己的产品中,并支持3D物体检测/定位的固件。它包含所有摄像头、MyriadX和RaspberryPi计算模块的承载板,让您能够在几秒钟内启动和运行。
这允许:
- 跳过PI的视频数据路径,消除NCS2的USB/CPU瓶颈
- 三维物体位置的无限x立体深度能力
- 由于Raspberry PI CPU/USB不再限制X,MobileNet SSD对象检测估计提高了约5倍。
所以,作为Python程序员,您现在拥有了所有对象的实时3D位置——在嵌入式平台上——并得到了Raspberry PI社区的支持!
从为什么开始
- 在美国,骑自行车的人的伤亡是一种流行病;
- 大多数情况下,驾驶分心是由智能手机(社交媒体、短信、电子邮件等)引起的;
- 在美国让骑自行车的人更安全是该项目的目标;
作为专注于AI/ML/嵌入式的技术专家,想尝试是否能够提出一个完整的技术解决方案。
通勤监护人
DepthAI平台
- 在设计通勤卫士的原型时,深度和人工智能的结合的强大令人震惊!
- 这样的嵌入式平台根本不存在
- 因此,在通勤卫士之路上的里程碑是建立这个平台,并将其作为标准产品销售。
- 目前,正在为Raspberry PI(计算模块)构建它
1)世界上最受欢迎的平台上的人类感知
2)Adrian的PyImageSearch Raspberry Pi 计算机视觉Kickstarter在10秒内售罄——验证了对Pi上计算机视觉的需求(并验证了Adrian是了不起的!)
开发步骤
第一件事就是为自己建立一个开发委员会。MyriadX是一个复杂的芯片,具有大量有用的功能,所以更想要一个可以轻松探索、尝试不同图像传感器等的板。下面是这样的:
BW0245
使用模块化摄像板制作了电路板,这样就可以很容易地测试出新的图像传感器,而不用考虑旋转新电路板的复杂性。所以该项目将继续使用这个,因为后续尝试新的图像传感器和摄像头模块。
在等待开发板被制造、填充等过程中,项目成员集思广益地讨论了如何降低成本(使用需要激光通孔的细间距BGA意味着原型很昂贵),同时仍然允许使用各种形状因素、车载/非车载摄像头等进行简单的实验。在模块上建立了Myriad X系统,这是一个有着所有疯狂激光通孔、堆叠通孔和所有高密度集成(HDI)板材料的电路板,这使它们变得昂贵。最终讨论认为,这样,我们就可以把它作为我们所做的Myriad X设计的核心,而不必不断地为昂贵的电路板制作原型。
BW1099
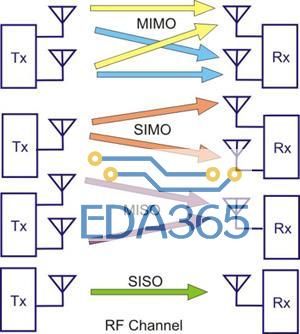
该项目公开了最终目标3D物体检测(即Mobilenet SSD物体检测+立体深度数据的3D重投影)所需的一切。因此,这意味着暴露一个用于处理高分辨率(例如12MP)彩色相机传感器的4车道MIPI,以及用于处理深度的2个2车道MIPI,例如:1MP全局快门图像传感器。
为了更好的度量,也在上面添加了一些其他接口、引导方法等,默认情况下,可以在不需要时节省成本,并且可以在需要时进行填充。
因此,当然,在制作模块时,您还需要制作一个用于测试模块的板。因此,在制作SOM的同时,可以开始攻击一个基本的突破载体板:
BW1098
它是基本的,但是会拉出所有重要的接口,并与开发板使用相同的模块化摄像板系统。所以在某种程度上,这是 “开发板精简版”。
一旦得到这两个命令,就必须把注意力转移到树莓派系统的设计上。它就在这里,在这一切的高度上,呈现出荣耀:
BW1097
那这是做什么的?关键是它是完全独立的。如果你需要给予一些自主权,你不需要更多的东西。它有视觉加速器(MyriadX)、所有摄像头、所有连接和您需要的接口——以及板上的Raspberry PI计算模块。
所以它是一个独立的系统,允许您编写一些简单的python来解决3年前人类还不能解决的问题!现在你可以在这个系统上完成所有的工作。








 热门文章
热门文章