
一、前言
Linux调度器神秘而充满诱惑,每个Linux工程师都想深入其内部一探究竟。不过中国有一句古话叫做“相由心生”,一个模块精巧的内部逻辑(也就是所谓的“心”)其外延就是简洁而优雅的接口(我称之为“相”)。通过外部接口的定义,其实我们也可以收获百分之六七十的该模块的内部信息。因此,本文主要描述Linux调度器开放给用户空间的接口,希望可以通过用户空间的调度器接口来理解Linux调度器的行为。
二、nice函数
nice函数用来修改调用进程的nice value,其接口定义如下:
#include
int nice(int inc);
为了方便说明该接口的作用,我们还是举实际的例子说明。程序调用nice(3),则将当前进程的nice value增加3,这也就是意味着该进程的优先级降低3个level(提升nice value也就是对别人更加nice,自己的优先级就会低)。如果程序调用nice(-5),则将当前进程的nice value减去5,这也就是意味着该进程的优先级提升5个level。当调用错误的时候返回-1,调用成功会稍微有一些歧义。POSIX标准规定了nice函数返回新的nice value,但是linux的系统调用和c库都是采用了操作成功返回0的方式。这样的处理方式使得在调用nice函数的时候无法得到当前的优先级,如果想要得到当前优先级,需要调用getpriority函数,我们在下一小节描述。
虽然说nice函数是用来调整优先级,实际上调整nice value就是调整调度器分配给该进程的CPU时间,具体是如何影响cpu time的呢?我们在后面描述内核代码的时候再详聊。此外,需要注意的是:根据POSIX标准,nice value是一个per process的设定,但是在linux中,nice value没有遵从这个标准,它是per-thread的一个属性。
三、getpriority/setpriority函数
从上节的描述中,我们了解到了nice的函数的限制,例如只能修改自己的nice value,无法获取当前的nice value值等,为此我们给出加强版本的nice接口,也就是getpriority/setpriority函数了。getpriority/setpriority函数定义如下:
#include
#include
int getpriority(int which, int who);
int setpriority(int which, int who, int prio);
你说接口增加功能是好事,怎么就把名字也改了呢?为何不是getnice/setnice呢?其实从上节的描述也看出稍许端倪,我们并没有区分调度优先级和nice value这两个值,历史上,首先被使用的是nice value,很快大家觉得这个词不是那么好理解,特别是对于初学者,因此改成优先级(priority)这样的名词可以让用户更好的理解这个API的作用,当然,事实证明这个改动并不是非常理想,我们后面会描述。
getpriority/setpriority功能比较强大,能处理多种请求,不同的请求通过which和who这两个参数来制定。当which等于PRIO_PROCESS的时候,who需要传入一个process id的参数,getpriority将返回指定进程的nice value。当which等于PRIO_PGRP的时候,who需要传入一个process group id的参数,此时getpriority将返回指定进程组中优先级最高的那个(BTW,nice value是最小的)。当which等于PRIO_USER的时候,who需要user id的信息,这时候,getpriority将返回属于该user的所有进程中nice value最小的那个。who等于0说明要get或者set的对象是当前进程(或者当前进程组,或者当前的user)。
setpriority类似与nice,当然功能要强那么一点点,因为它可以接收PRIO_PROCESS,PRIO_PGRP或者PRIO_USER参数用来设定一组进程的nice value。setpriority的返回值和其他函数类似,0表示成功,-1表示操作失败,不过getpriority就稍微有一点绕了。作为linux程序员,我们都知道的nice value是[-20, 19],如果getpriority返回这个范围,那么这里的-1优先级就有点尴尬了,因为一般的linux c库接口函数返回-1表示调用错误,我们是如何区分-1调用错误的返回还是优先级-1的返回值呢?getpriority是少数返回-1也是有可能正确的接口函数:在调用getpriority之前,我们需要首先将errno清零,调用getpriority之后,如果返回-1,我们需要看看errno是否还是保持0值,如果是,那么说明返回的是优先级-1,否则说明发生了错误。
四、操作rt priority的接口
传统的类unix内核,调度器是采用round-robin TIme-sharing的算法:如果有若干个进程是runnable的,那么不着急,大家排排队、吃果果,每个进程分配一个cpu时间片,大家轮流按照分配的时间片来获取cpu资源,所有的时间片用完,那么就重新一轮的分配。在这样的模型下面,间接影响cpu时间片的nice接口函数就够用了。当然,分配了更多的时间片也就是意味着有更高的优先级,因此nice vlaue也被称为进程的优先级。
但是,新的需求层出不穷(人类的欲望是无穷D),特别是实时性方面的需求,因此,POSIX标准(2008版本)增加了实时调度的内容,并且提供了POSIX realTIme scheduling API来让用户空间来修改调度策略和调度优先级。这下子有点尴尬了,原来的nice value大家已经习惯称之为进程优先级了,现在真正的进程优先级登场了,怎么区分?为了解决这个问题,我们引入一个新的名词叫做调度策略(scheduling policy)。调度器在运作的时候往往设定一组规则来决定何时,选择哪一个进程进入执行状态,执行多长的时间。那些“规则”就是调度策略。
好的调度策略依赖于对进程的分类,有一类进程是大家都灰常的熟悉了就是普通进程,使用时间片轮转算法的那些进程。当然这类进程还可以细分,例如运算密集型进程(SCHED_BATCH,调度器最好不要太经常的唤醒这种进程),例如idle类进程(SCHED_IDLE),idle类进程优先级非常低,也就是说如果系统有其他事情要处理就去干别的事情(调度其他进程执行),实在没有活干了,再考虑IDLE类型的进程。不论哪一种普通进程,其优先级使用nice value这样一个调度参数来描述就OK了。
除了普通进程,还有一类是严格按照优先级来调度的进程,如果熟悉RTOS的话,对priority-base的调度器应该不会陌生,官大一级压死人,只要优先级高的进程是runnable的,那么优先级低的进程是根本没有机会执行的。这里的优先级才是真正意义的优先级,但是nice value已经被称为进程优先级了,因此这里的优先级被叫做rt priority。rt进程的调度又被细分成两类:SCHED_FIFO和SCHED_RR。这两种调度策略在相同rt priority的时候稍有差别,SCHED_FIFO是谁先到谁先获取cpu资源,并且一直占用,直到主动让出cpu或者退出,相同rt priority的进程才有机会执行。SCHED_RR稍微人性化了一点,相同rt priority的进程有时间片,大家轮流执行。对于实时进程而言,rt priority这个调度参数就描述了全部。
介绍到这里,是时候总结一下了:进程优先级有两个范围,一个是nice value,用前两个小节的API来set或者get。另外一个优先级是rt priority,完全碾压nice value这种优先级,操作rt priority的接口就在这一小节描述。
OK,经过漫长的铺垫过程,我们终于可以介绍realTIme process scheduling API了,具体API定义如下:
#include
int sched_setscheduler(pid_t pid, int policy, const struct sched_param *param);
int sched_getscheduler(pid_t pid);
int sched_get_priority_max(int policy);--返回指定policy的最大的rt priority
int sched_get_priority_min(int policy);--返回指定policy的最小的rt priority
int sched_setparam(pid_t pid, const struct sched_param *param);
int sched_getparam(pid_t pid, struct sched_param *param);
sched_get_priority_max和sched_get_priority_min分别返回了指定调度策略的最大和最小的rt priority,不同的操作系统实现不同的优先级数量。在linux中,实时进程(SCHED_FIFO和SCHED_RR)的rt priority共计99个level,最小是1,最大是99。对于其他的调度策略,这些函数返回0。
sched_getscheduler函数可以获取指定进程的scheduling policy(如果pid等于0,那么是获取调用进程的调度策略)。sched_setscheduler函数是用来设定指定进程的scheduling policy,对于实时进程,该接口函数还可以设定rt priority。如果设定进程的调度策略是非实时的调度策略的时候(例如SCHED_NORMAL),那么param参数是没有意义的,其sched_priority成员必须设定为0。sched_setparam/sched_getparam非常简单,大家自己看man page好了。
五、一统江湖的接口
看起来前面小节描述的API已经够用了,然而,故事并未结束。经过前面关于调度接口的讨论,基本上我们对调度器的行为也已经有了了解:调度器就是按照优先级(指rt priority)来工作,优先级高的永远是优先调度。范围落在[1,99]的rt priority是实时进程,而rt priority等于0的是普通进程。对于普通进程,调度器还要根据nice value(这个也曾经被称为优先级,不要和rt priority弄混了)来进行调整。用户空间的进程可以通过各种前面描述的接口API来修改调度策略、nice value以及rt priority。一切看上去已经完美,CFS类型的调度器处理普通的运算密集形(例如编译内核)和用户交互形的应用(例如vi编辑文件)。如果有应用有实时需求,可以考虑让rt类型的调度器来运筹帷幄。但是,如何混合了一些realTIme的应用以及有一些timing要求的应用的时候,SCHED_FIFO和SCHED_RR并不能解决问题,因为在这种调度策略下,高优先级的任务会永远的delay低优先级的任务,如果低优先级的任务有一些timing的需求,这时候,你根本控制不了调度延迟时间。
为了解决上一节中描述的问题,一类新的进程被定义出来,这类进程的优先级比实时进程和普通进程的优先级都要高,这类进行有自己的特点,参考下图:
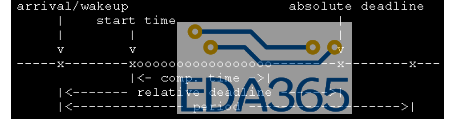
这类进程的特点就是每隔固定的周期都会起来干活,需要一定的时间来处理事务。这类进程很牛,一上来就告诉调度器,我可是有点脾气的进程,和其他的那些妖艳的进程不一样的,我每隔一段时间(period)你就得固定分配给我一定的cpu资源(computer time),当然,分配的cpu time必须在该周期内执行完毕,因此就有deadline的概念。为了应对这种需求,3.14内核引入了一类新的进程叫做deadline进程,这类进程的调度策略是SCHED_DEADLINE。调度器对这类进程也会高看一眼,每当一个周期的开始时间到来的时候(也就是该deadline进程被唤醒的时间),调度器要优先处理这个deadline进程对cpu timer的需求,并且在某个指定的deadline时间内调度该进程执行。执行了指定的cpu time后,可以考虑调度走该进行,不过,当下一个周期到来的时候,调度器仍然要奋不顾身的在deadline时间内,再次调度该deadline进程执行。
虽然deadline进程优先级高于其他两类进程,但是用“优先级”来描述这类进程当然是不合理的,应该使用下面的三个参数来描述:
(1)周期时间(上图中的period)
(2)deadline时间(上图中的relative deadline)
(3)一次调度周期内分配多少的cpu时间(上图中的comp. time)
至此,估计您也已经发现,前面描述的接口其实都是不适合设定这些参数的,因此,GNU/linux操作系统中增加了下面的接口API:
#include
int sched_setattr(pid_t pid, const struct sched_attr *attr, unsigned int flags);
int sched_getattr(pid_t pid, const struct sched_attr *attr, unsigned int size, unsigned int flags);
attr这个参数的数据类型是struct sched_attr,这个数据结构囊括了一切你想要的关于调度的控制参数:policy,nice value,rt priority,period,deadline等等。用这个接口可以完成所有前面几个小节描述API能完成的任务,唯一的不好的地方就是这个接口是linux特有的,不是posix标准,是否应用这个接口就是见仁见智了。更细节的知识这里就不描述了,大家还是参考man page好了。
六、其他
上面描述的接口API都是和调度器参数相关,其实Linux调度器还有两类接口。一个是sched_getaffinity和sched_setaffinity,用于操作一个线程的CPU affinity。另外一个接口是sched_yield,该接口可以让出CPU资源,让Linux调度器选择一个合适的线程执行。这些接口很简单,大家仔细学习就OK了。
参考文档:
1、POSIX标准2008
2、linux下的各种man page
3、linux 4.4.6内核源代码
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 基于单片机和CAN控制器和CAN收发器实现多机系统系统的设计
基于单片机和CAN控制器和CAN收发器实现多机系统系统的设计





 APP下载
APP下载 登录
登录







