×


无线供电技术随着气候变化、能源枯竭和环境保护的日趋严峻而不断发展,而电磁所具有的功率大、输电效率高的特点,各高校和研究机构先后投入该领域的研究和应用。但目前主要研究成果仍然集中在美国、日本、韩国等国家。我国的研究主要集中在实验和验证、应用推广领域。各高校也将无线供电作为课程设计和毕业设计引入到教学当中,并组件相关的兴趣小组。而循迹小车作为典型的机器人技术,应用领域越来越广泛,将无线输电技术和循迹结合起来,是实现扩大循迹小车应用功能的一个思路。
1设计概要
小车的设计与制作共分为四个部分,首先制作实验模型的框架,尺寸为50CM*50CM,材料为木制框架及PT板台面,同时进行技术析,包括线圈排布,变压器位置等进行初步设计。其次选定循迹方式,在设计过程中初次方案为基于C51单片机平台的循迹,为降低负载功率,选用基于ATS51平台的红外探测比较循迹方式。选定方案后,进行小车的焊接与制作。再次是选定充放电电路,进行比较后制作供电系统模块。最后对供电系统与循迹小车的配合进行仿真,进行参数修正,并形成成品。
2循迹模块设计
2.1小车循迹原理
循迹小车的循迹原理是在制作好的模型框架上,可以用记号笔等进行自由的轨道绘制,由于黑线与白底对光的反射系统不同,传感器可根据接收到的反射光来进行判断,并将判断结果输送给电机。
2.2检测电路
在循迹的方式中,利用红外探测是一种经济有效的方法,由于设计对精度的要求不高,因此采用红外探测的方法。即红外线对不同颜色物体的表面有着不同的反射性质,当遇到白色底板时候,发生漫反射现象,反射光被接收管接收,若为黑线,则接收管无信号。为提高可靠性,采用集成式的ST系列探头,该系列探头具有价廉、方便、可靠等优点,其内部结构和外接电路。(见图1)
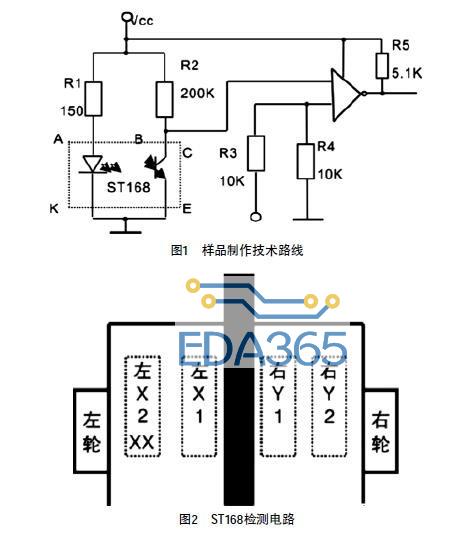
图2中R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率满足检测需要;R2限制接收电路电流,保护接收红外管和检测电路的灵敏度的调节。在输出端增加了比较器,先将ST168输出电压与2。5V进行比较,再送给单片机处理和控制。
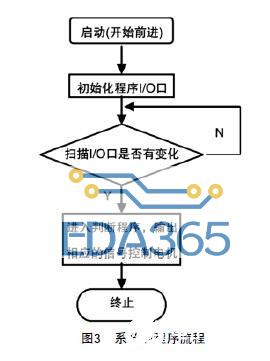
高发射功率红外光电二极管和高灵敏光电晶体管是ST168的主要组成部分,检测方式为非接触式。当然也存在检测距离小(8~15mm),8mm以下为检测盲区,大于15mm干扰过大。经过反复比较和测试,距离检测表面为11mm为最佳检测距离。安装的排列方式如图2所示。在底盘装设4个红外探测头,进行两级方向纠正控制,提高其循迹的可靠性。
2.3软件控制单元
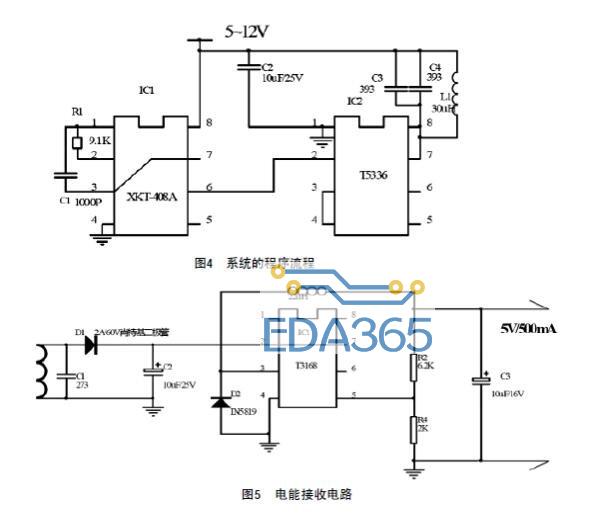
软件控制是循迹小车制作的核心部分,起着控制小车所有运行状态的作用,主要表现为循迹程序的设计与编写。当小车进入循迹模式,程序不间断读取与传感器连接的I/O接口,若检测到接口有信号变化,则启动判断程序,同将输出的结果输送给电机,通过电机的动作纠正小车的状态。其程序控制方框图。(见图3)
2.4车速的控制
车速控制是设计中比较重要的部分,一般可以通过步进电机代替直流电机,实现车速调节。另外一种做法是在原有直流电机的基础上,采用PWM调速法进行调速。若采用前一种,则在机械装置的设计时需要进行预先设计与制作,因此采用后一种方式,利用输出端高电平的脉宽及占空比的大小来控制电机的转速度。通过实验不断调整相应的参数,使小车能够较为平稳地进行动作,克服在寻循迹时摇摆的问题。
2.5电机驱动单元
由于单片机接口输出的信号功率很低,在无多余负载时也无法驱动电机,在实际应用往往加入驱动芯片,用来提高驱动功率,使能够根据实际需求来控制电机转动,在设计中根据驱动功率大小的需求选择L298N驱动芯片。
3无线供电模块设计
3.1无线供电概述
无线电能传输(WirelessPowerTransmission,WPT),就是在无任何物理上的连接或接触(不用导线)的情况下,通过电磁场、电磁波进行电能传输的一种技术。美国麻省理工学院于2007年发表其研究成果后,无线电能传输技术作为一种中等距离无线电能传输技术,受到了越来越广泛的关注。该成果中所叙述的磁耦合谐振式无线电能传输技术也就成为了研究热点问题。
3.2无线供电模块设计
3.2.1电磁感应充电原理
其工作原理与变压器相似,但原边和副边是分离的,没有任何物理上的连接接触,当发送线圈中通以交变电流,该电流在将在周围介质中形成一个交变磁场,电能、磁能随着电场与磁场的周期变化以电磁波的形式向空间传播,要产生电磁波首先要有电磁振荡,电磁波的频率越高其向空间辐射能力的强度就越大,电磁振荡的频率至少要高于100KHZ,才有足够的电磁辐射。接收线圈中产生的感应电动势可驱动小车型。
系统通过逆变电路将直流电转换为高频等幅交流信号驱动原边绕组,副边绕组磁通量的高频变化使得副边绕组中产生一定幅值的高频感应电动势,经过整流、滤波、稳压可得到具有一定驱动能力的直流电。
3.2.2电路设计
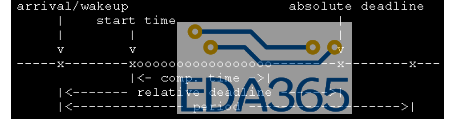
设计中由于原、副边线圈存在很大的漏感,所以要提高系统的效率,需要加入适当的补偿,减小漏感的能量消耗,使电路工作在谐振的状态,可以有效降低电源的电压电流定额,使得原边电压电流同相位,输入具有高功率因数。选用XKT-408A集成PWM方波调制发生器芯片完成高频振荡,用T5336集成晶闸管芯片做功率放大电路,综合考虑电能发射模块的复杂程度、体积、成本以及小车模型的工作电压和工作电流需求,设计电能发射的原边电路如图4所示。
副边电路用肖特基二极管进行整流后经T3168开关型集成稳压芯片变压后输出5V给小车供电,电路。(见图5)
3.2.3电路的仿真与实验
(1)仿真
利用MULTISIM绘制出仿真实验电路:按图设置各元件的参数,打开仿真开关,从示波器上两个通道观察输出波形及其与输入信号的关系。
(2)实际电路的测试。
为分析各个因素对传输效率的影响,参数选择时,根据实际应用情况,首先确定发射线圈用线径Φ0.7mm,外径50mm,电感量30uH,接收线圈线径Φ0.7mm,直径为50mm。
4结语
为可行性探索实验的样机,目标功能为驱动小功率汽车模型,如果将该设计推广到电动汽车上为大容量电池充电,从理论上还需要有相当长的时间,同时存在功率稳定和电磁辐射的问题。通过实验模型验证,初步概想作为新型玩具,或者应用到现代工厂中的智能循迹小车,具备一定的应用价值,当然还有如供电功率、线径、传输效率等诸多因素要考虑,在后续的研究中加以深入探讨。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 软件架构要分层.分模块.具体该怎么做?
软件架构要分层.分模块.具体该怎么做?




 APP下载
APP下载 登录
登录







