APP下载
APP下载 登录
登录







1 系统的具体设计与实现
1.1 系统组成
系统组成如图1所示,在系统设计中采用两块单片机(AT89S52)分别作为可移动的声源的检测和控制核心。通过单片机(MCUl)对接收器接收到声源信号的时间做处理,检测出当前小车的位置,然后通过无线发送给MCU2。MCU2根据当前的位置控制电机的转速及转向,当停止下来时给出相应的声光提示。
1.2 具体算法实现
1.2.1 设计与计算
该设计主要是根据接收器接收到声源信号的时间间隔来确定当前小车的位置S,如图2所示。设S点到C点的距离为a。S点到A点的距离为b;S点到B点的距离为c。设S点的坐标设为l,h),假设由单片机测得接收器A、接收器B和接收器C接收到信号的时间间隔计算出b与a的距离差为c1;b与c的距离差为 c2。由图2中关系可得到如下方程:
则可根据测量的距离差△d=|c2-c1|求得相应的小车的位置(l,h)。
1.2.2 误差信号产生
该设计的误差信号产生主要有三个方面:
检波误差 由声源信号产生的半波损失,其误差的大小与声源信号发射的频率有关。当频率越小时,△d=|c2-c1|则越小。如频率为5 kHz的声源信号,其周期为O.2 ms,则半波损失导致△d=0.1 ms×340 m/s=3.4 cm,所以频率越大,半波损失越小。
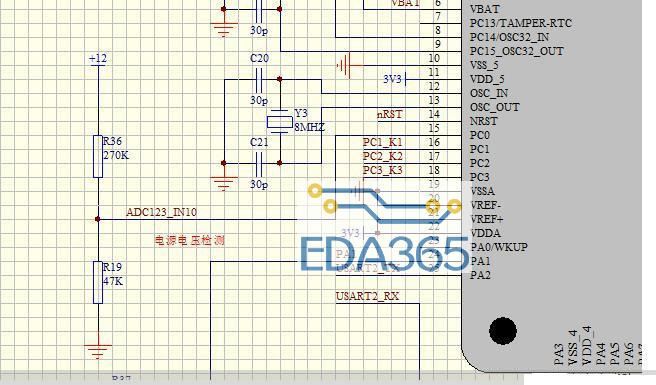
单片机的测量时间产生的误差 单片机晶振为24 MHz,内部时钟经12分频后,时钟周期为O.5μs,测量时间误差为±0.5μs,则会产生一定的误差信号。
计算误差 在计算声源位置的过程中,数据有一定的取舍,则会产生一定的误差。
1.2.3 控制理论简单算法
该设计的控制理论简单算法主要考虑三种方案:
方案一:根据计算出的△d=|c2-c1|的值来确定小车是否移动,当移动到△d=O时,控制小车停止。
方案二:根据测得△d=|c2-c1|的具体值控制字PWM,PWM=K△d,其中k为比例调节,△d越大,K越大,从而控制小车的速度。
方案三:PID控制算法
在连续运动控制系统中,将偏差的比例(P),积分(I)和微分(D)通过线性组合构成控制量。控制系统中以驱动电机转速采样信息为反馈量,采用增量式数字PID控制算法,通过输出PWM信号对电机实现闭环控制。计算公式为:
式中:△un为第n次输出增量;en为第n次偏差;en-1为第n-1次偏差;en-2为第n-2次偏差。增量式PID控制系统中的KP,KI,KD参数,一般经反复测试、分析,最终确定理想数值。考虑到算法的简单可行和实际应用,采用方案一最简单,且能够实现小车速度的控制。
2 单元硬件电路设计
根据系统组成框图,系统只要由以下几部分电路组成.对各电路的设计与实现,分别有以下不同的设计方案。
2.1 可移动声源调制电路设计
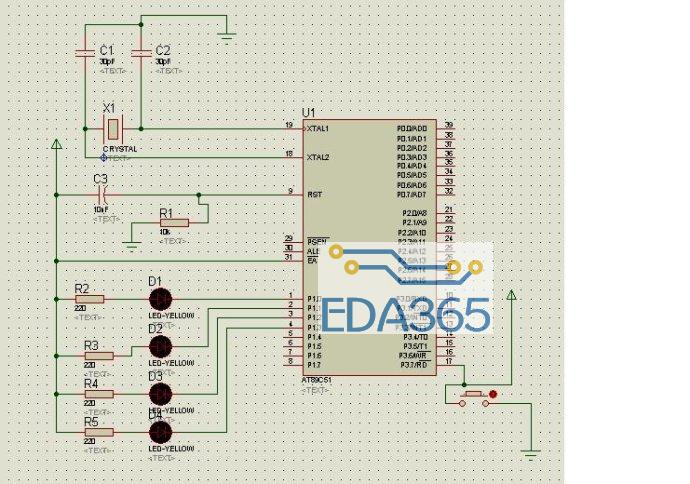
可移动声源产生的信号为周期性音频脉冲信号。利用RC振荡电路产生可调的周期性音频脉冲信号,经功率放大再由扬声器向外发送,该方案产生的音频信号高次谐波信号较大,经过电路的改进使高次谐波大大减小,可以满足设计要求。电路图如图3所示。
2.2 接收器电路设计
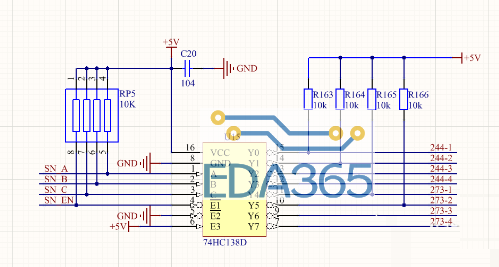
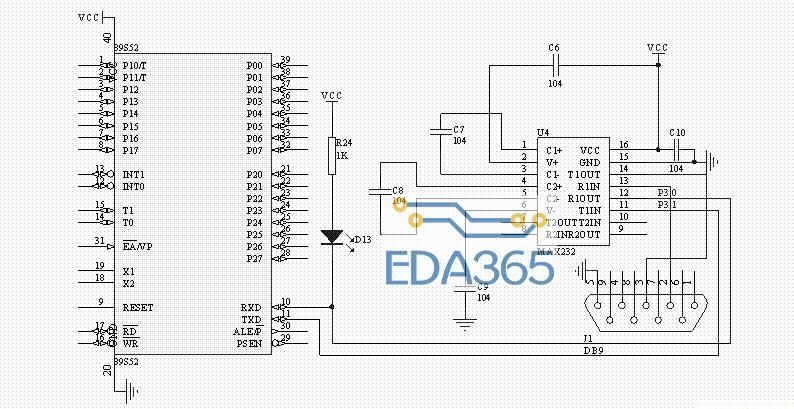
接收器电路主要用于接收可移动声源发出的音频脉冲信号,然后传送给单片机(MCUl),由单片机1(MCUl)对接收器接收到声源信号的时间做处理,检测出当前小车的位置,然后通过无线发送给单片机2(MCU2)。所以能不能很好地接收到音频信号是整过设计的关键。设计考虑接收器的信号采集传感器采用 MIC,将采集信号放大、滤波、整形,产生方波信号,传送给单片机,由于MIC灵敏度较高,受外界噪声干扰较大,中间加高通滤波电路,可实现对声源信号的接收。电路图如图4所示。








 热门文章
热门文章
概念")