APP下载
APP下载 登录
登录







1 理论分析与计算
1.1 设计原理分析及计算
小车自动测高测距的过程及相关参数如图1所示。当小车停放在A点时,遥控小车的装置调整角度,使测量光点定点到C点,测量并存储此时的角度α;之后,遥控控制小车前进,使小车沿直线行进到达B点,并再次调整测量装置,使测量光点再次定点到C点,并测量记录此时的角度β。并对从A到B的行进距离L进行测量和记录。利用以上数据,就可以计算出待测目标的高度H及小车距离待测目标的距离S,计算式如下式(1)所示。
1.2 系统设计思想
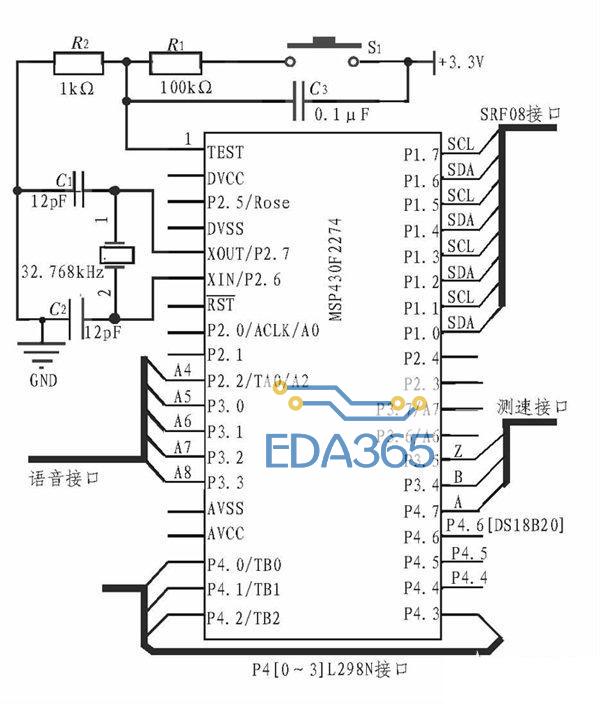
从测量过程看,需要进行测量的数据有角度α、角度β和小车行进距离L。通过对器件的反复比较,在本设计中,采用安装在舵机上的激光光源作为定点C点的装置;采用角度传感器来进行角度的测量;采用霍尔传感器作为距离测量的传感器;采用单片机作为主要控制单元,来控制小车直线行进、舵机转动定点、角度及距离数据的获取和计算及测量数据的LCD显示等。








 热门文章
热门文章