APP下载
APP下载 登录
登录







随着计算机软硬件技术、电力电子技术及信号处理技术的飞速发展,超声波获得了非常广泛的应用。近年来,由于微机的广泛应用,构成计算机控制的智能控制系统或装置越来越多。这里基于PWM技术,应用单片机组成智能控制系统,对目前的大功率、高频率、高性能的智能化超声波电源技术进行了研究。
1 系统的硬件电路组成
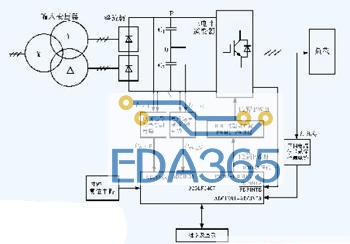
系统原理框图如图1所示,他包含功率变换主电路和控制电路两大部分。主电路采用交-直-交结构,包括整流、直流滤波器、逆变器、变压器及负载等组成部分。其中,交-直部分为桥式整流,经过电解电容器虑波得到平稳电流。逆变器选用IGBT作为开关元件,电路在传统桥式结构的基础上加入一个简洁的辅助网络,形成移相控制全桥逆变器,该电路可以在任意负载和输入电压范围内实现零电压开关(ZVS),减少损耗,提高了电源利用效率。
逆变器的控制电路在整个系统中至关重要,这里采用MCS-96系列8089单片机作为智能控制部分的核心,采用正弦脉宽调制方式(SPWM)对逆变器进行控制,用以实现功率匹配和频率跟踪的数字化技术。
1.1 单片机控制系统
本控制系统由MCS-96系列8089单片机、74LS138地址译码、EPROM2764和RAM6264等构成最小微机系统,完成超声波频率给定、载频频率设定,模拟输出单极性正弦波恒幅脉宽调制信号(SPWM),还可实现功率、频率显示以及过压、过流、过温保护控制。
超声波电源系统中负载换能器工作在谐振状态,为了保证负载端电流和电压同频同相,要加上同步锁相环。因此,本文逆变环节采用双环结构的PWM控制方式,控制框图如图2所示。
同步电压信号由相位及峰值检测电路送至单片机锁相处理,单片机通过D/A数模转换口输出与同步电压同相位的标准正弦波,外部电压环通过将直流母线电压给定信号U*d与实际的直流母线电压Ud进行比较后得到的误差信号送入PI调节器,PI调节器的输出则为要控制的输出电流幅值指令信号Im,这里电压环的PI调节器在单片机内部用软件来实现。电流幅值指令信号Im与标准正弦波相乘后得到了幅值可调的正弦电流给定信号i*a,与实际的输出电流反馈信号ia进行比较,电流误差信号经比例调节器(为减小稳态误差,这里采用大比例控制,由外部硬件电路实现)放大后送入比较器,再与三角载波信号比较形成SPWM信号,该SPWM信号经过驱动电路去驱动主电路开关器件,便可使实际的输出电流跟踪给定信号,从而达到与同步电压保持同相位变化,提高了输出的功率因数,同时由于输出电流的幅值决定了输出功率的大小,那么幅值可调也决定了输出功率的可调,并且也达到了控制支流母线电压的目的。
1.2 SPWM原理和波形
脉宽调制逆变器简称PWM,简单地说,是通过控制逆变器内部开关器件的通、断顺序和时间分配规律,调控逆变器输出电压中基波电压的大小和频率,增大输出电压中最低阶次谐波的阶次,并减小其谐波的数值,来达到调控其输出电压,同时又改善输出电压波形的目的。
本文采用单极性正弦波恒幅脉宽调制信号(SPWM),调制原理见图3。图3中,Uc是载波信号,Ur调制信号,利用采样控制理论中冲量等效原理,在他们相交点可得到一组等幅矩形脉冲,脉宽和正弦曲线下的面积成正比,脉宽基本上呈正弦分布。从图中也可以看出在单极性调制时,Uc是与Ur始终保持同极性的关系,即正弦波处于正半周时,载频信号也在正值范围内变化,产生正的调制脉冲序列,与此相同,在负半周产生负的调制脉冲序列。根据在正弦波半周内载频信号的频率,可以确定产生调制脉冲的数目,这样也就同时决定了控制各个功率管的通断次数。SPWM产生的调制波是一系列等幅、等距而不宽的脉冲序列。
1.3 软锁相
锁相环是一个相位反馈控制系统。锁相环由三部分组成,即鉴相器(PD)、环路滤波器(LPF)和压控振荡器(VCO),其基本构成如图4所示。其主要工作原理:输入电压与输出Ui与输出Uo通过鉴相器PD进行相位比较,得到相位误差信号Ue,Ue再经过低通滤波器LPF产生控制电压Ud,Ud加到压控振荡器VCO上使之产生频率偏移,从而跟踪输入信号的频率,当输入信号频率与输出信号频率相同时,锁相环锁定,从而实现频率跟踪。
本文利用单片机8089实现软锁相。锁相部分的软件设计主要分两个部分,一是输入电压U的相位检测;二是电流指令正弦波的输出。
相位的检测利用8089单片机的外部中断实现,其P0.7引脚的正跳变信号触发中断,连续两次正跳变的时间间隔即为负载基波电压的周期丁Ts。
正弦电流指令的产生由8089单片机与D/A转换器共同完成,他是由N级阶梯波近正弦。8089单片机有2个定时器和4个软件定时器,且均可产生中断,软件定时器的中断时间间隔可设定,利用他来产生正弦的数字信号。首先根据D/A转换器的参数生成基准正弦Su的正弦表,综合考虑8089单片机的运算速度以及控制程序的运行等,选取合适的正弦表点数(亦即阶梯波的阶梯数)N,则每个阶梯所占的时间为Ts/N。在软件定时器中断服务程序中,首先设定下一次的软定时中断时间Ts/N,再利用查表法实现i*=α?Su,这里α为正弦的比例系数,由电压环的误差电压决定其大小。
以上分析了相位的检测和正弦电流指令的产生,接下来是实现正弦指令与输入电压的同步。在利用查表法产生正弦时,正弦表指针P对正弦表循环计数(0~N)。当发生外中断,即负载基波电压过零时,正弦电流指令也应该正向过零点,所以在外部中断服务程序里,应该修改指针P,使P位于正弦表的正向过零点。然而由于存在软硬件的延时,往往不能将P指向正弦表的正向过零点,而应指向p*(这里p*与正弦表的正向过零点有一个偏差△p),才能使D/A输出的电流指令i*与输入电压U的相位差为0。p*的选取需要在实验中确定,于是在外中断服务程序里将P指向p*。
2 系统软件设计
2.1 主程序
主程序包含初始化子程序、显示子程序和采样子程序以及中断程序地址的设定,参数的设定等,开放软中断以及软定时中断等。初始化子程序中,对各寄存器设定初值,对单片机本身的I/O口、定时器设定工作方式。显示子程序可对电压与电流信号进行定时采样,A/D转换后,经I/O口输出,进行动态显示。本系统还可对超声波电源频率、功率进行设定、显示。
2.2 中断服务子程序
中断服务子程序分为外部中断服务程序和软件定时器中断服务程序
2.2.1 外部中断服务程序
外部中断服务程序中主要完成以下任务:在每次发生外部中断时,把指针P重新指向p*,同时将正弦表点数即阶梯数赋给初值(这里程序中一共在一个周期中设置了125个正弦表点数,每次外中断发生时,依次输出125个点即完成正弦电流指令的输出),并设置外中断发生标志和采样标志。
2.2.2 软件定时器中断服务程序
软件定时器根据母线电压PI子程序计算的正弦比例来实现正弦波的输出,或者也可以通过软件设置为固定的比例输出,即固定的功率输出。由于采用周期控制,一个周期20 ms,正弦表点数取为125,所以大约160μs发生一次中断。其程序流程图如图5所示。
2.3 母线电压PI调节子程序
母线电压采样信号送人CPU后,由软件来实现电压环PI调节的数字化,本文采用增量型PI算法,其表达式为:
令A=KP+KIT,B=KP,他们是与比例系数、积分系数、采样周期相关的系数。则上式可简化为u(k)=u(k-1)+Ae(k)-Be(k-1),那么数字PI控制算法的程序流程图如图6所示。
3 结 语
基于SPWM技术的大功率超声波电源由于采用单片机智能控制系统,从而使电源频率可实现人工设定,输出电压亦可通过调节可控整流角α而改变;锁相环实现输出电流与电压保持同频同相,从而能将电能以近似于1的功率因数,提高了电能利用率;同时采用高频调制后可获得高质量的输出电流波形,抑制了高次谐波,使换能器损耗减小,从而可为大功率超声波换能器在各个领域应用提供性能优良的超声波电源。








 热门文章
热门文章