APP下载
APP下载 登录
登录







在嵌入式前后台系统中,外部的异步事件通过中断来捕获并运行在后台,而其他的任务则运行于前台。提高系统中的任务处理能力,是嵌入式前后台系统设计的重点。本文描述了利用状态机来提高嵌入式前后台系统任务处理能力的实现方法。为了便于研究和描述状态机在嵌入式前后台软件系统中的应用,本文将以移动2G光纤直放站近端机的监控软件案例来阐述和说明。
本文引用地址:/zixunimg/eepwimg/www.eepw.com.cn/article/104888.htm1 移动2G光纤直放站近端机监控单元
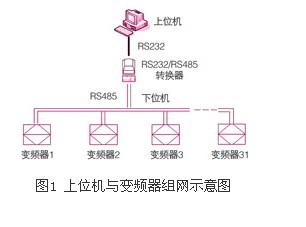
对于移动2G光纤直放站近端机监控单元,只介绍与本文有关部分的原理框图,如图1所示。图中GSMModem通过AT91SAM7S256的串口1相连。由于GSMModem的特性和短消息的收发,其通信收发处理相对比较繁琐和复杂。例如,发送短消息时,需要向Modem发送“AT+CMGS=电话号码”并等待一定的时间,再发送短消息内容,等待发送成功。短消息发送成功后,GSMModem将回应“+CMGS序号”的信息。其发送需要等待的时间长短不定。
xa0
在移动2G光纤直放站近端机中,通过串口1发送到GSMModem的数据不仅仅是短消息,还包括下行功率查询、信源信息查询、读取/删除短消息等。因此,针对移动2G光纤直放站近端机监控单元的要求和软件系统为前后台系统的特点,移动2G光纤直放站近端机监控单元的监控软件设计采用了状态机和队列的方式。
2 软件的设计思路
根据前后台软件系统的特点,结合移动2G光纤直放站近端机的硬件结构,以移动2G光纤直放站近端机的监控软件中的短消息收发子系统为例,来阐述软件的设计思路。GSMModem的短消息接收采用软件主动读取的方式,即软件以中断方式接收到短消息在Modem中存储的序号,然后软件主动读取短消息和删除已读取的短消息。短消息的收发处理流程如图2所示。
2.1 短消息的接收
如图2所示,GSMModem主动上报的信息将存储到串口1接收缓冲区中,软件从串口1接收缓冲区的数据中解析出短信序号(Modem收到的短消息在Modem中的存储序号)存储到短信序号队列(短信序号缓冲区1~n)中,然后软件通过短信序号队列的状态来决定是否需要向Modem发送读取短信或者删除短信命令。
当软件发送读短消息命令后,GSMModem将对应序号的短信息送出,数据将存储到串口1接收缓冲区中,软件再从串口1接收缓冲区的数据中解析出短消存储到短信队列(短信缓冲区1~m)中。这样需要软件处理的短消息就存储到了短信队列中,而处理的事情则交由软件的其他区处理。
xa0
图2 直放站短信收发处理流程
2.2 短消息的发送
对所有需要发送到GSMModem的数据,则通过UART1发送缓冲区来完成。具体发送哪些数据(读取/删除短信、下行功率查询、信源信息查询、未读短信查询)或者缓冲区的数据(短消息发送缓冲区、告警上报发送缓冲区)由软件根据相应的状态来选择确定。
3 设计思路的实现
3.1 串口1数据的发送
3.1.1 串口1发送缓冲区的数据结构
串口1是否有数据需要发送,由串口1的发送缓冲区的状态来决定。串口1发送缓冲区的数据结构定义如下:
typedef struct{
unsigned char bStBuf;//bStBuf =
Uart1_TxBuf_Rdy或者=Uart1_TxBuf_Wait或者=Uart1_TxBuf_Empty
unsigned short Index;
unsigned short Len;
char Buf[270];
}Uart1Buf_t;
① bStBuf成员: 串口1发送缓冲区的状态。
② Index成员: 串口1发送数据缓冲区索引。
③ Len成员: 串口1发送数据缓冲区中有效数据的长度。
④ Buf成员: 串口1发送数据缓冲区。
3.1.2 串口1发送缓冲区软件定时器
由于GSM Modem的特性致使串口1不能不间断地发送数据,因此,对串口1的数据发送设定一个软件定时器。软件定时器用于控制GSMModem是否可以接收来自串口1的新数据。软件定时器的结构定义如下:
typedef struct{
unsigned char bTimerSt;//软件定时器的状态: Timer_START或Timer_STOP
unsigned int TimerCtn;//软件定时器的计数器
void (*func)(void);//超时后相应的处理功能函数指针
}SoftTimer_t;
① bTimerSt成员: 用于描述软件定时器的状态。它有2种状态:
◆ Timer_START――开始软件定时器;
◆ Timer_STOP――停止软件定时器。
② TimerCtn成员: 用于描述软件定时器的定时时间。它是一个32位的计数器,硬件定时的基准时间为20ms(建议设置在前后台系统主程序循环1次需要的时间),因此最大定时时间为20 ms×232=85 899 345.92 s。
③ func成员:
用于描述软件定时器超时需要去处理相应事情的函数。该函数是在定时器中断服务程序下运行的,因此为了减少中断服务程序占用CPU的时间,函数只作简单的状态设置或者清除工作,如函数Clear_Uart1TxbStBuf。
void Clear_Uart1TxbStBuf(void){
Uart1Tx.bStBuf = Uart1_TxBuf_Empty;//设置串口1发送缓冲区为空
……
}
3.1.3 串口1数据发送状态机
串口1发送缓冲区的成员bStBuf有3种状态。
① Uart1_TxBuf_Rdy: 串口1发送缓冲区数据准备好。
② Uart1_TxBuf_Wait: 串口1发送缓冲区数据等待。
③ Uart1_TxBuf_Empty: 串口1发送缓冲区空。
3种状态的转移情况如图3所示。
xa0
图3 串口1的发送缓冲区状态机
linux操作系统文章专题:linux操作系统详解(linux不再难懂)







 热门文章
热门文章