APP下载
APP下载 登录
登录







引言
目前,随着导弹武器射程、速度、飞行高度和机动性的不断增加,电动舵机系统正向着输出力矩大、响应速度快、功率大、体积小、集成度高、全数字化方向发展。无刷直流电动机不仅保持了传统直流电动机良好的动、静态调速特性,且结构简单、运行可靠,已经在国防、航空航天等领域中得到了较好的应用。
MIL-STD-1553B总线作为一种具有较高数据传输性能和管理效率、传输可靠的数据总线,已经发展成熟并被广泛应用于航空航天、武器装备等复杂控制系统中。
本文以大功率无刷直流电动舵机为对象,设计了一套基于DSP+FPGA的数字化高精度、高可靠性的控制器,并且实现了1553BRT终端接入功能。
1 舵机系统总体设计方案
舵机系统采用位置、速度、电流三闭环控制策略,总体硬件设计如图所示。具体工作过程如下:DSP通过1553B通讯模块与主控计算机之间进行可靠通信,通过转子位置和舵面偏角检测电路获取转子位置、转速以及舵面实际偏角信号,结合自带ADC模块采样得到相电流,通过三闭环控制算法处理,输出调制PWM信号作用于功率驱动电路,驱动无刷直流电机转动。利用FPGA的灵活可配置性设计硬件逻辑电路实现对各主功能芯片的时序控制,包括1553B通讯模块、转子位置及转速检测电路和舵面偏角测量电路,大大减少了DSP软件开销,提高了CPU工作效率。
图1舵机系统总体硬件结构图
2 硬件电路设计
2.1 DSP主控单元
主控制器采用美国TI公司的32位定点数字信号处理器TMS320F2812。该芯片采用哈佛总线结构,将数据总线和程序总线分开,每秒可执行1.5亿次指令(150MIPS),具有单周期32X32位的乘与累加运算(MAC)功能。针对电机控制应用,片内集成了两个功能强大的事件管理器(EVA、EVB),16通道的高速ADC模块。
逻辑控制单元
FPGA逻辑功能芯片选用Altera公司的CycloneII系列EP2C8T144C8。CycloneII是基于StratixII的90nm工艺推出的FPGA芯片,具有8256个逻辑单元(LE),内置36个M4KRAM块,2个锁相环(PLL)以及18个乘法器模块,提供给用户85个可用的IO管脚接口。该芯片主要配合DSP使用,实现逻辑控制功能。
总线通讯模块设计
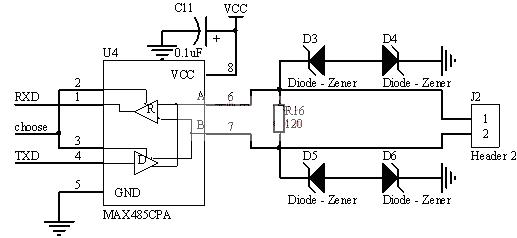
选用DDC公司的BU-61580[5]作为1553B总线通信协议芯片。该芯片内部集成有数字协议控制电路,双路总线收发器等模块,FPGA只需要操作协议芯片的17个常规寄存器和4KX16bit的RAM,全部通信过程协议芯片都能自动完成。BU-61580与FPGA的电路连接如图所示。利用74LVC4245芯片进行逻辑电平匹配,TRANSPARENT/BUFFERED拉低将BU-61580设置为16位缓冲工作模式,FPGA直接使用芯片内部4KX16bit共享RAM。
图2BU-61580与FPGA的电路连接图
功率驱动模块设计
功能驱动模块采用Fuji公司的7MBP75RJ120,该IPM模块能耐受高达1200V电压,75A电流,内部设有电源欠压、过热保护、过流保护和短路保护功能。具体电路连接如图所示。DSP输出六路PWM信号经过高速高共模比的光耦芯片HCPL-4504驱动IPM内部的IGBT,进而控制无刷电机的三相电压U、V、W。故障信号通过光耦芯片TLP521-1传递给DSP中断口,电源供电采用4个独立的WRB0515直流电源模块。








 热门文章
热门文章