APP下载
APP下载 登录
登录







| 目录 | ||
| 第一部分 | | | 嵌入式视觉的发展趋势 |
| 第二部分 | | | MIPI简介 |
| 第三部分 | | | 在嵌入式视觉中使用FPGA |
| 第四部分 | | | CrossLink FPGA简介 |
| 第五部分 | | | 应用案例 |
| 第六部分 | | | 使用CrossLinkFPGA进行设计 |
| 第七部分 | | | 设计流程 |
| 第八部分 | | | 小结 |
| 第九部分 | | | 参考资料 |
过去几年里,嵌入式视觉应用大量涌现,包括从相对简单的智能视觉门铃到执行随机拾取和放置操作的 复杂的工业机器人,再到能够在无序、地形不断变化的环境中导航的自主移动机器人(AMR)。快速采 用嵌入式视觉技术的行业包括汽车、消费电子、医疗、机器人、安防/监控以及大量工业应用。
如今,嵌入式视觉正逐渐应用于人工智能(AI)和机器学习(ML)系统中,用来分析图像和视频流、检测/ 识别人和物体以及从看到的景象中提取信息,便于采取下一步行动(关于AI、ANN、ML、DL和DNN的常见 问题1)。
本文首先介绍了当今嵌入式视觉设计一些趋势。然后探讨了现场可编程逻辑门阵列(FPGA)在嵌入式 视觉系统中的应用。最后讨论了使用莱迪思半导体的CrossLink™ FPGA创建嵌入式视觉系统。
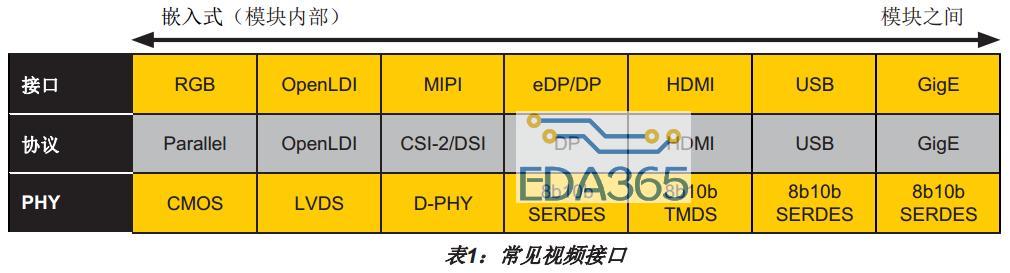
| 接口 | 协议 | PHY | ||
| RGB | Parallel | CMOS | ↑ | 嵌 入 式 (模块内部) |
| OpenLDI | LVDS | |||
| D-PHY | CSI-2/DSI | MIPI | ||
| eDP/DP | DP | 8b10b SERDES | ||
| HDMI | 8b10b TMDS | 模 块 之 间 | ||
| USB | 8b10b SERDES | |||
| GigE | ↓ | |||
嵌入式视觉的发展趋势
推动嵌入式视觉设计的主要趋势有:高分辨率和高带宽的需求持续增长,系统中视觉传感器和显示器的数 量与日俱增,以及小尺寸和低功耗的要求不断涌现。此外,将人工智能(AI)和机器学习(ML)功能加入 嵌入式系统也是大势所趋,尤其是添加到靠近视觉传感器的本地端。
嵌入式视觉系统的另一个趋势是接口标准的数量和种类不断增长。表1列出了一些最常见的接口类型。 其中用于“模块内部”(inside the box)的标准(如设备内部)通常要求驱动几厘米到几十厘米大小的 设备,而“模块之间”(box-to-box)的接口可能需要在几米到几百米甚至更大的设备间驱动视觉数据。
PHY这个术语是“物理层”的缩写,通常是在芯片上或者作为芯片(集成电路)实现的一种电子电路。 PHY用于实现开放系统互连(OSI)模型的物理层功能,无论计算或电信系统底层内部结构和技术如何,该 模型都能对其通信功能进行标准化。








 热门文章
热门文章