APP下载
APP下载 登录
登录







1步进电机驱动原理
步进电机驱动是靠给步进电机的各相励磁绕组通电,实现步进电机内部磁场方向的变化来使步进电机转动的。设我们所用的步进电机是四相的,这四相分别为A,B,C,D,对应于四对磁极。每个磁极的内表面都分布着大小,齿间距相同的多个小齿(不同的步进电机,小齿的个数不同),假设Ⅳ为转子中小齿的个数。当这4相按A—B—C—D的顺序通电时,步进电机的内部磁场变化一周(360°),此种通电方式为单相四拍通电方式,此时步进电机的步距角:
θ=90°/N
若N=50,则θ=1.8°
如果选择的通电顺序为A—AB—B—BC—C—CD—D—AD,此种通电方式为双相八拍通电方式,此时步进电机的步距角为:
θ=45°/N
若N=50,则θ=0.9°
步距角是步进电机一次能转过的最小角度,电机的步距角越小,说明电机走的越精确,所以本文选择驱动电机通电的方式为双相八拍通电方式。
2设计方案
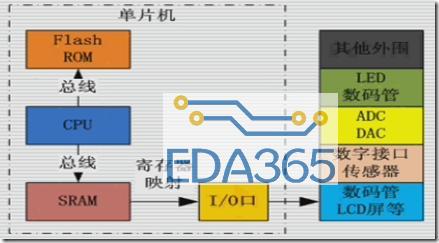
一个完整的,控制精度高的步进电机控制系统框图如图1所示。CPLD和步进电机的驱动器相连,驱动器把CPLD输出的信号放大后送入步进电机,由于数控机床的各个轴是靠电机的转动来带动的,所以电机的转动带动相应轴的动作。








 热门文章
热门文章