×


本文旨在解释和论证时序抖动和这三种噪声源之间的直接关系。
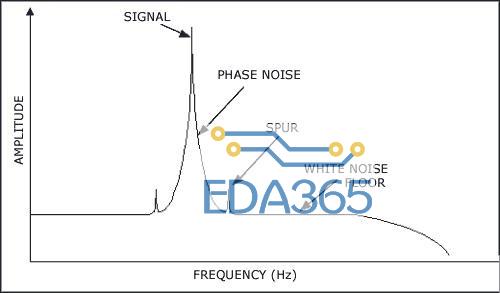
图1. 对时序抖动产生影响的三个噪声源。

图2. 时钟信号内的随机噪声与杂散信号导致的抖动。抖动会随时间积累。
随着现代元件的工作带宽进入数千兆赫兹范围,宽带噪声对时序抖动的影响变得相当突出。例如,一个宽带放大器驱动器的带宽是40GHz,噪声系数是10dB,小信号增益是20dB,输出功率是0dBm,则它产生的噪声输出是-38dBm (-174dBm + 10dB + 20dB + 10log10(40GHz))。这导致38dB的信噪比(SNR)。在这个SNR水平,宽带噪声就是时序抖动的重要影响因素。总均方根(RMS)噪声电压是噪声底在频带内的积分。图3说明了RMS噪声是如何转化为时序抖动的。
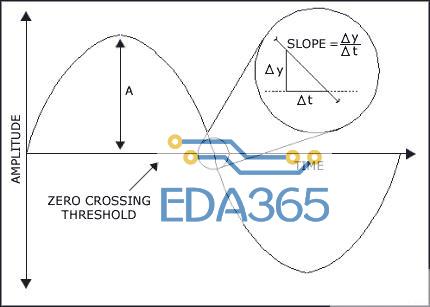
 y穿越0V,使信号提前t达到阈值,从而产生了抖动。
y穿越0V,使信号提前t达到阈值,从而产生了抖动。
从数学上来说,可以用下面的公式表示包含宽带白噪声的正弦波:

其中A为振幅, 是角频率,
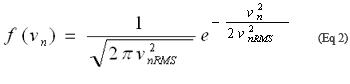
是角频率, (vn)的概率分布(vn)为:
(vn)的概率分布(vn)为:
其中y = Asin(2 t)来计算的。结果就是抖动分布函数,如直方图所示。
t)来计算的。结果就是抖动分布函数,如直方图所示。
假设 t。
t。
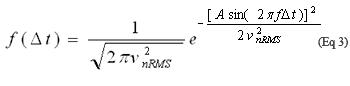
公式3可变为:

把公式4中各项的分子和分母同除以,得到:

公式5为抖动分布函数,除比例因子1/外,它与公式2中的高斯分布相似,因此,得到的RMS抖动为:

图4所示的测试装置用来验证公式6。纯正弦波信号和宽带噪声信号相互叠加,然后输入采样示波器,它在零交叉处测量抖动。为了确保测试结果有意义,设置的输入宽带噪声要高于示波器的噪声底。图5和图6显示了实验结果。图5表明在RMS噪声恒定时,抖动是频率的函数;图6表明频率恒定时,抖动是RMS噪声的函数。测量得到的抖动曲线和计算得到的抖动曲线之间具有相似性,证明公式6可用来把宽带噪声转化成时序抖动。
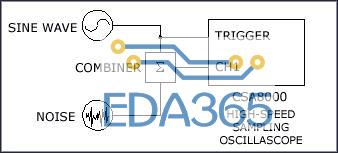
图4. 抖动测试装置#1:噪声和纯正弦波信号叠加。
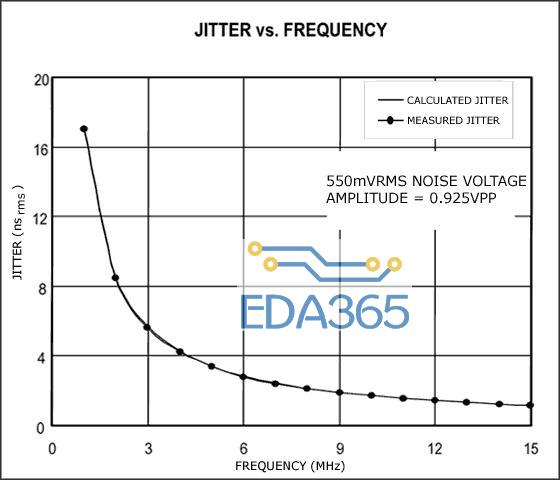
图5. 在RMS噪声一定的情况下,抖动为频率的函数。
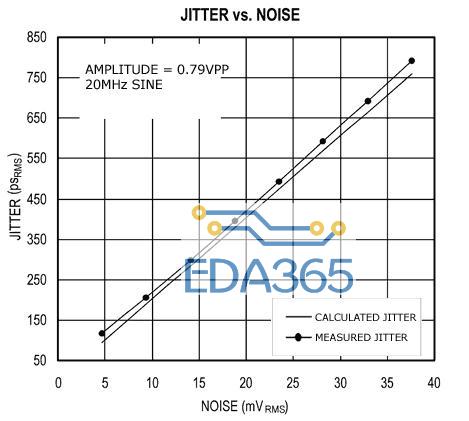
图6. 在频率一定的情况下,抖动为RMS噪声电压的函数。
普通波形的抖动
经过稍微修改,公式6还能用于其他波形的抖动转化。根据定义,公式6中的项是0V阈值时的压摆率S。只要已知该阈值处的压摆率,任何波形都可用于求出t与y之间的关系,这是因为y = St (图3)。把它代入公式2得到公式7:
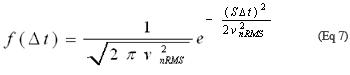
把公式7中各项的分子和分母同除以S,得到:

除比例因子1/S外,公式8与公式2中的高斯分布相似,因此,得到的RMS抖动为:

图4所示的测试装置再次用于验证公式9。正弦波曲线用一个压摆率可变的方波代替。在方波上升沿的50%处测量抖动。图7所示结果表明公式9是正确的。

图7. 在方波上升沿的50%处测量抖动。
图7中给出的信息引出了一个有趣的现象。似乎波形的压摆率越快,产生的抖动越小。然而,较快的压摆率要求较高的工作带宽,这增加了系统中的RMS噪声。因为RMS噪声与带宽成正比,因此系统设计者必须仔细选择压摆率和带宽,来使抖动降到最低程度。

图8. 由于振荡器的噪声频率调制,输出频谱中出现“裙边”效应。
受大多数抖动测量设备能力所限,与测量低噪声信号在时域中的抖动相比,通常更容易通过测量它在频域中的相位噪声来确定其纯度。例如,多数抖动测量示波器只能测量低达1psRMS的抖动。大多数实时示波器的带宽仅为7GHz。而另一方面,相位噪声设备能获得目前最佳的低噪声示波器的噪声测量水平(在时域中远小于1ps),并提供高达40GHz的带宽。
在早期的文章[1-2]中我们已经探讨了相位噪声和时序抖动的转换问题。为了得到相位噪声与抖动的关系式,可以考虑把公式10作为一个带有相位噪声的正弦曲线:

其中A是振幅, fo是额定频率,  (t)为相位噪声。通常在两个或多个周期之间的0V交越处测量抖动。在0V交越处, 公式10括号内的各项为2N:
(t)为相位噪声。通常在两个或多个周期之间的0V交越处测量抖动。在0V交越处, 公式10括号内的各项为2N:


其中t1为第一个零交越时刻,t2为第N个零交越时刻。两个公式相减得出:

两个交越点之间的时间为周期数量加上抖动:

TO为周期,即1/fO,t是N个周期后积累的抖动。把公式14代入公式13得:

重新整理公式15,并消去2N项,得到抖动:

RMS抖动的平方为:

因为(t)是个稳态过程,所以:

其中()为(t)的频谱密度,f为偏移(傅立叶)频率。公式17的中间项变为:

其中( )是()的自相关函数,是经过 为:
)是()的自相关函数,是经过 为:

利用代数公式1 - cos(2 = 2sin2(),并假设相位噪声接近载波并且对称(就是从-fOFFSET到0的积分等于0到+fOFFSET的积分),公式20可以重写为:

()近似等于相位噪声) [3];也就是说,傅立叶频偏比载波频偏小得多: fOFFSET << fO。

为了验证公式22,使用了一个相位调制电路[4],它是图9所示测试装置的一部分。相位调制电路可以非常方便地产生无杂散、可变相位噪声信号。首先,利用采样示波器针对时序抖动测量该电路的输出,然后用频谱分析仪(没有画出)针对相位噪声测量其输出。图10显示了该电路的相位噪声图。它类似于锁相振荡器的噪声图,在这种振荡器中,相位噪声在环路带宽内是恒定的,并在带外滚降。图11给出了使用数值积分对公式22求积分后得到的相对于周期的累积抖动。图11中的曲线证实了公式22的正确性。
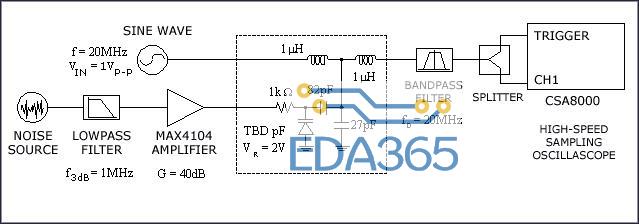
图9. 抖动测试装置#2:使用相位调制器产生相位噪声和抖动。

图10. 相位调制电路的相位噪声图形。
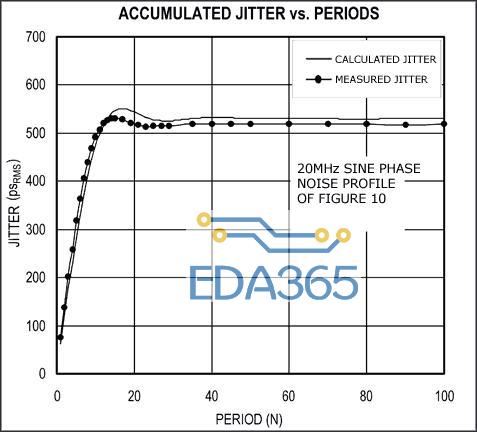
图11. 图形显示的是相对于周期的累积抖动,证实了公式22的正确性。

同样, NTo为经过N个周期的时间。由于公式23未假定杂散信号是对称的,所以要乘的系数为4而不是8。在计算抖动时,载波两侧的杂散信号都必须包含在内。L(fn)为杂散信号相对于载波(预期信号)的振幅,通常以dBc为单位。fn为n次谐波的频率偏移。图12是公式23的波形图,使用载波两侧的杂散信号,频偏为100kHz,振幅为-40dBc。参考文献1中验证了公式23,方法是用一条正弦波调制一个压控晶体振荡器,产生载波两侧的杂散信号(没有画出)。
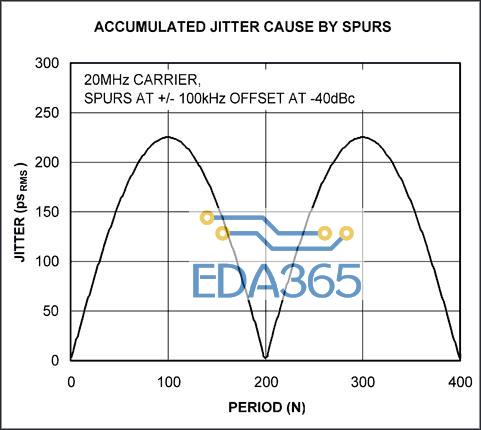
图12. 公式23的曲线,显示了载波两侧产生的杂散信号。

附录:计算RMS噪声电压
如果已知某种电子器件的一项或几项常规噪声规格,那么可以通过多种方法来确定它的总RMS噪声电压。表1列出了一些元件制造商们通常提供的噪声指标。
| Component | Noise Specification | Unit |
| Amplifier | Residual noise-floor power density | dBm/Hz |
| Noise figure | dB | |
| Input referred noise density | nV/ Hz Hz | |
| Oscillator | Phase noise floor | dBc/Hz |

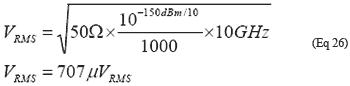
系统的典型负载阻抗ZO为50 ,PRMS为RMS噪声功率,BW为带宽,NOISE-FLOOR是以dBm/Hz为单位的噪声底密度。例如,一个放大器的带宽为10GHz,输出噪声密度为-150dBm/Hz,则它产生的总RMS噪声电压为707μVRMS:
,PRMS为RMS噪声功率,BW为带宽,NOISE-FLOOR是以dBm/Hz为单位的噪声底密度。例如,一个放大器的带宽为10GHz,输出噪声密度为-150dBm/Hz,则它产生的总RMS噪声电压为707μVRMS:
噪声系数(NF)常用于描述低噪声放大器和功率放大器噪声性能。可以从噪声系数推导出噪声底密度,方法是把它与50电阻的热噪声相加,再加上系统增益,公式如下:

例如,一个噪声系数为10dB、小信号增益为20dB的放大器的噪声底密度为-144dBm/Hz。

已知噪声密度,就可以推出总噪声电压。
另一方面,运算放大器噪声特性的表现形式通常是输入参考噪声,单位为nV/Hz。假定噪声电流可忽略,信号源阻抗远小于放大器输入阻抗,那么总RMS噪声可通过下面公式计算:

例如:一个输入噪声密度为8nV/Hz、小信号增益为20dB、带宽为1GHz的放大器产生的噪声电压为800μVRMS: 
振荡器的相位噪声的单位通常为dBc/Hz。dBc单位表示输出噪声对期望信号功率的归一化。下面的公式可用于计算总RMS噪声电压:

其中PSIG为振荡器的输出功率。例如,某个振荡器在50产生的功率为10dBm,输出相位噪声底为-150dBc/Hz、有效带宽为100MHz, 则输出噪声电压为224mVRMS:
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 可减少总功耗和元件数目的DOCIS 3.0兼容型RF DAC
可减少总功耗和元件数目的DOCIS 3.0兼容型RF DAC





 APP下载
APP下载 登录
登录







