×


引言
目前,污水处理厂运用集散控制系统模型可以最大限度提高污水处理厂运行可靠性,提高出水水质,降低能耗和工人劳动强度,达到提高经济效益的目的。可编程计算机控制器(prograrnrnable ComputerController,简称PCC)以其可靠性高、编程方便、耐恶劣环境、功能强大等特性已成为工业控制领域中增长速度最迅猛的工业控制设备,它能很好地解决工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题。
随着工业以太网技术、现场总线技术的发展,由现场总线与工业以太网构建的“一网到底”工业控制网络系统,使得工厂的高层管理人员能直接获得工业现场的控制信息,实现工厂管理与生产现场的无缝集成。根据污水处理行业的特点,设计了基于工业以太网和现场总线的污水处理控制系统的整体解决方案。本文以兰州某县的污水处理为例,介绍了基于贝加莱PCC、工业以太网和CAN现场总线的污水处理自动控制系统的实现。PCC通过以太网与现场控制设备间建立通信,从而实现数据现场设备的自动控制。
1系统分析及设计
1.1控制要求分析
该污水处理厂日处理污水量为5.0万米3/天,出水标准要求实现国家《城镇污水处理厂污染物排放标准》一级B标准。对污水进行三个阶段的处理。一级处理:主要去除污水中呈悬浮状态的固体污染物质,经过一级处理的污水,BOD一般可去除30%左右。二级处理:主要去除污水中呈胶体和溶解状态的有机污染物质(BOD,COD物质),去除率可达90% 以上,使有机污染物达到排放标准。三级处理:进一步处理难于降解的有机物、氮和磷等能够导致水体富营养化的可溶性无机物等;处理工艺采用CASS池工艺生化处理,之后在接触池加氯使尾水达标后排入黄河。污泥处理采用机械浓缩脱水处置工艺泥饼外运卫生填埋,污水处理流程如图1所示。
1.2 系统方案确定
基于以上特点,显然系统属于典型的分布式控制系统。在和传统方案比较后,采用基于工业以太网标准TCP/IP和CAN现场总线结合的分布成网络系统构架,完成该污水处理厂的自动控制系统设计。主要基于以下几点考虑:
(1)工业以太网重点在于利用交换式以太网技术为控制器和操作站,各种工作站之间的相互协调合作提供一种交互机制,并和上层信息网络无缝集成。目前工业以太网开始在监控层网络上逐渐占据主流位置,正在向现场设备层网络渗透。
(2)由于CAN总线具有强有力的错误检测能力及差分驱动功能,在强噪声的苛刻环境中仍运行良好,因此在传媒传输和线路设计方面,CAN总线可以很容易的适合大多数应用场合。CAN采用多主站工作,并且总线最多可挂接110个节点,因此系统中各功能模块都可以直接挂接到总线上。根据现代控制系统既需要集中管理,又需要分散实时控制的工艺要求,污水处理自动控制系统采用现场总线式集散控制系统,采用CAN总线技术,可以将信息在现场处理,极大地提高其可靠性、实时性。
(3)将工业以太网和CAN总线很好的结合在一起,实现无缝集成。可以使工业以太网和现场总线各显其能,形成优势互补,提高系统整体性能。
图1 污水处理流程图
2 系统设计与实现
2.1 控制方案
根据污水厂的分布情况,设置三个PCC现场控制站,主要功能是实现对所有现场在线仪表的数据采集,分别设置在三个位置。
(1)PCC1为污泥脱水机房控制室:主要功能是负责贮泥池、污泥脱水机房、冲洗水池的设备控制及数据采集。
(2)PCC2为粗格栅及污水提升泵房控制室:负责粗格栅及污水提升泵房、细格栅及沉砂池、配水井、进厂水水质的设备控制及数据采集。
(3)PCC3为变配电室控制室:主要功能是负责鼓风机房、CASS反应池、接触池、加氯间、出厂水水质的设备控制及数据采集。
其中3号站变配电室现场控制站包括四个远程站,分别设置在CASS反应池滗水器附近。在工艺流程各个环节中设置了完整的全过程检测仪表,如流量、液位、压力、PH、溶氧仪等检测仪表,确保对工艺全过程运行状态、水量、水质的监控,满足各环节的自动控制需要。
该控制系统采用开放的分布式控制系统,整个污水厂自控系统由中央控制室操作员站、现场PCC控制站和现场仪表组成。中央控制室操作员站和现场PCC控制站之间通过工业以太网连接,数据和参数可以在PCC与中央控制室管理站之间相互传送 ;PCC控制站和现场仪表之间通过现场总线和4~20mA进行数据传输。
2.2 系统硬件与网络结构设计
本系统下位机采用三台贝加莱X20高性能X20CP1485控制器,该控制器自带以太网和CAN总线通信接口,其处理频率达到Celeron 400MHz,达到400μs任务执行时间。通过编制控制程序,对污水处理现场控制站I/O模块的温度、流量、液位、PH值等数据进行采集、分析、运算并相应输出结果对电磁阀的启停进行控制。自带以太网接口实现与监控中心数据通信,采用容易扩展的X20系列的I/O单元,采集远程设备数据信号 。
基于TCP/IP的工业以太网是一种标准开放式的网络,易于实现将控制现场的设备与上位管理系统实现互联,进而实现数据、信息与系统资源的共享;数据的传输距离长、传输速率高,易与Internet连接,易组网,与计算机、服务器的接口十分方便,并受到广泛的技术支持。但无法保证数据传输的实时性要求,是一种非确定性的网络系统。CAN现场总线的数据通信具有突出的可靠性、实时性和灵活性。CAN总线的节点分成不同的优先级;采用非破坏仲裁技术;报文采用短帧结构,数据出错率极低;节点在错误严重的情况下可自动关闭输出。CAN现场总线作为一种面向工业底层控制的通信网络,但是它不能与Intemet互连,不能实现远程信息共享。所以选择将工业以太网与现场总线相结合应用于该污水处理项目中。在工业以太网和CAN现场总线通过网关进行网络互连。这是一种低成本、高可靠性、快捷的CAN现场总线与工业以太网互连方案。这样可以在利用现有网络的基础上,充分发挥工业以太网和CAN现场总线的优势,实现整个工业控制系统的网络连接。系统网络结构如图2所示。
图2 系统网络图
在PCC现场控制站上,配置了带TCP/IP接口的通讯模块,以便和中央控制站通讯。另外利用CAN总线实现与现场设备的连接,将现场的设备全部挂到CAN总线上,通过CAN总线实现与以太网的连接。PCC现场控制站监视和控制污水处理的整个生产过程,并通过通讯网络与监控计算机及其它现场控制设备进行通讯。中控室能够观察到一些重要的运行状态和工艺参数,对现场设备进行操作及控制参数的设置和修改。[page]
3 CAN总线的实现
3.1 CAN总线硬件组成
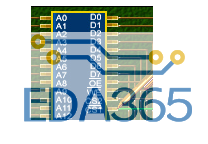
本系统采用的是微处理器P89C668,外加CAN控制器SJA1000、CAN 收发器TJA1050 以及以太网通信控制器RTL8019AS,组成一个通信协议转换网关模块,功能模块如图3所示。
图3 功能模块图
P89C668是本系统的主要控制部分,实现对网络芯片以及CAN器件的控制,并进行两者之间的协议转换。CAN控制器SJA1000应用BasicCAN工作模式,这种模式支持具有很多新特性的CAN2.0B协议,支持错误分析功能,对CAN收发器进行控制,为微控制器提供了控制CAN总线的简单接口。收发器是CAN协议控制器和物理总线的接口,分别为总线和CAN控制器提供不同的传输和接收能力。在微控制器对CAN控制器进行相应配置后,收发器自动完成相应的CAN总线操作。CAN收发器和CAN控制器是通过光耦实现总线上各CAN节点间的光电隔离,而且光耦电路的两个电源VCC和VDD必须采用小功率电源隔离模块进行电源的完全隔离。以太网通信控制器,给微控制器提供控制以太网的简单接口,使微控制器只需要对其进行相应读写即可完成对以太网的操作。隔离滤波器用于提高网络通信的抗干扰能力。
网关主要完成CAN总线到以太网的协议转换。它由CAN控制器协议转换模块和以太网控制器协议转换模块两部分组成,网关硬件中微处理器起核心作用。CAN控制器协议转换模块硬件电路由三部分组成:微处理器、CAN通信控制器、CAN总线收发器。以太网控制器协议转换模块主要由微处理器、以太网通信控制器和隔离滤波器组成。以太网通信控制器RTL8019AS是一种高集成度的全双工10MbPS以太网控制芯片,实现了基于ETHERNET协议的MAC层的全部功能,完成数据包的接收和发送功能。
3.2 CAN软件实现
在PCC中进行CAN I/O操作,在硬件配置中选择CAN通信接口,在软件配置表中配置CAN I/O属性。定义从站的站号应该与实际连接的硬件站号设置一致。利用CAN进行连网数据通信,用CANopen指令对CAN接口进行初始化。用CANopen在初始化程序中初始化CAN控制器。初始化之前,参数enable置1,设定通信速率为Baud rate,定义CAN接口参数。系统将反馈CAN通信接口的标识号US—ident,此标识号将在CAN函数库中读写数据的功能块上使用。CANwrite功能块将数据写在总线上,在循环任务中调用。这些数据可以通过给定的can—id号往总线上发送。
PCC的CAN帧最多可用8个字节的信息进行读写。这部分通过调用CAN函数库来实现,其中包括CANOPEN,CANWRITE,CANREAD等。CANOPEN函数包括完成对CAN总线的初始化。
需要注意的是CAN总线的初始化必须包含在初始化例程INITsP中。CANOPEN(1,BAND—RATE,COB—ANZ,ADR(ERROR—ADR),0,0,US—IDENT,STATUS)其中BAND—RATE=25,即代表波特功率为250K。US—IDENT是调用CAN初始化得到的反馈到PCC的CAN的ID,在CAN总线的读写过程都将用到该参数。CAN总线的写信息通过在优先级较高的进程中采用CANWRITE函数,其函数参数定义如下:CANWRITE(ENABLE,US—IDENT,CAN— ID,DATA— ADR,DATA— LNG,STATUS),enable=1,US—idenf为在CANopen()初始化中建立的US—idenf。CAN—id为数据目标CAN模块有关的CAN数据桢的ID。DATE—ADR为发送数据模块的首地址。DATA—LNG为发送的数据长度。其最大值为8。如果以CAN—ID为帧地址数据被成功发送则status:0,反之sta.tus=错误代码。
系统的结构框图如图4所示。
图4 CAN总线结构框图
4 系统软件实现和上位组态
4.1 软件编程
下位PCC的网络组态和硬件配置及编程全部在B&R编程工具中完成,它全面支持全集成自动化功能,可将数据管理、通信、编程同时集成在一个环境中去完成。应用这种便利的方法,在完成对三个站点的网络组态和通信连接后,进行编程调试,实现了各个站的控制要求。
贝加莱PCC控制器采用分时多任务操作系统和多样化的应用软件的设计,是基于多任务环境下设计程序,采用大型应用软件的模块化设计思想,应用程序的运行周期则与程序长短无关,而是由操作系统的循环周期决定。其系统软件使用AutomationStudio编程语言,包括:常规PLC使用的指令表语言如梯形图、结构文本、SQF、指令表,而且还支持高级语言如BASIC语言和C语言 ,使开发人员可以很好的选择自己熟悉的编程方法。本系统使用高级语言C进行编程,其运算时间快,而且容易实现模块化编程,可以使控制更加快速和精确,以达到更好的控制目标。
4.2 控制系统上位机设计
上位机软件采用组态王贝加莱专用版Kingview for B&R 1.0,除具有组态王6.53所具备的功能外,还具有以下特点:(1)以驱动的方式支持贝加莱所有的产品;(2)支持冗余服务器、冗余CPU、冗余网络;(3)支持自动上载PCC中的变量;(4)支持结构体和数组变量类型。
为过程控制和现场监控开发的监控系统软件。在组态时充分利用其强大的上下位全集成功能,大大节约了开发时问并增强了系统的透明访问度。在利用上位工具组态王实现主要功能如下,(1)监视功能:全面实时显示各工艺参数值和各设备当前状态,以及故障报警、报表等。(2)调节功能:对各调节阀进行手/自动调节以及对工艺参数的设定等功能。
主控界面的组态由于系统设备较多,需要将系统流程及设备操作界面分别呈现在多张画面内。画面问的切换使用组态王内部按钮的鼠标动作来实现。
5 结束语
该系统针对污水处理自动控制系统,采用工业以太网和CAN纵向集成的技术,主要介绍了CAN总线的实现,总线与工业以太网之间的协议转换。充分利用贝加莱PCC编程灵活,可靠性高与CAN总线充分结合,将以太网进一步延伸到工业现场级,使控制系统结构具有最大的开放性、互操作性和实时性。在完全达到技术要求的基础之上,为以后的扩展和升级留下足够的空间,系统已经应用于兰州某县污水处理厂,功能完善、运行稳定、自动化程度高,完全满足其控制要求,各站运行平稳,各方面性能都得到厂方的好评。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 嵌入式系统实时性的问题
嵌入式系统实时性的问题




 APP下载
APP下载 登录
登录







