×


1 引 言
现场总线是用于现场仪表与控制系统和控制室设备之间的一种全分散的、 全数字化的、 智能、双向、多站点、 开放式的通信网络。它的出现导致了传统控制系统结构的变革,并形成一种新型的网络集成式全分布控制系统一 现场总线控制系统FCS (Fieldbus Control System) 。与此同时,随着Internet 的广 泛应用, 计算机技术和网络技术得到迅速发展,Internet 成为了信息时代的主要信息载体。 并引起工业界和学术界的广泛关注。
一方面, 现场总线技术从工业现场设备底层向上发展, 逐 步扩展到网络化、开放性和分布性;另一方面,计算机网络从互联网 Internet 顶层向下渗透, 直至和底层的现场设备可以通信。具有远程监视功能的现场总线控制系统 应运而生,它通过现场控制网络 ( 或现场总线 ) 、 企业 网 ( Intranet ) 和因特网( Internet ) 把分布于各局部现场、独立完成特定功能的控制计算机互联起来, 以达到资源共享、 协同工 作、 远程监视和集中管理为目的的全分布式设备控制和状态监视系统。
LonWorks作为现场总线的一 种,是美国Echelon公司2 0世纪 9 0年代推出的一种新型控 制网络技术。它支持国际标准化组织 I S O定义的开放系统互联 O S I 全部七层协议的现场总线标准,因其网络结构简单、成本低 、通讯协议公开等特性得到深入研究和广泛应用。本文介绍了一套完整的集组态控制、实时监视、远程监视为一体的 LonWorks现场 总线网络控制实验系统CS2003,它是针对过程控制实验室现有的3套模拟工业现场的实验系统:压力控制系统、温度/流量控制系统 、自行开发的液位控制系统,文中主要说明系统的总体设计及实现。
2 系统的体系结构
CS2003是具有远程监视功能的 LonWorks现场总线过程控制实验系统, 因此应实现 以下几点功能。
①下位 LonWorks智能节点可对控制对象进行实时控制。
②现场上位计算机可进行控制功能组态和实时画面监视。 并具有实时趋势曲线、历史趋势曲线、 数据报表生成、 打印和多媒体语音报警功能。
③在客户端浏览器的网页上直观地显示各个控制对象的运行状态图、实时曲线图。
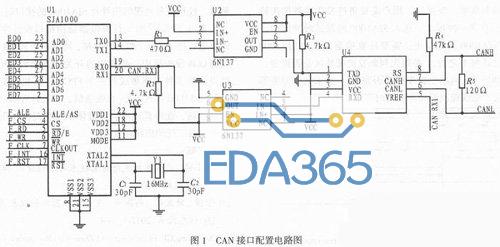
根据系统的工作流程和实现功能,可将系统划分 为现场控制级、上位监控级和远程监控级。它包括 LON通用智能节点( 硬件) 、 上位组态控制和监视平台( 软件) 以及远程监视平台( 软件) ,如图 1所示 。
现场控制级和上位监控级采用两层全分布式体系结构。控制级主要是由LON智能节点完成现场的控制功能。监控级则一方面基于各个节点进行节点组态 、通过LonManagerDDE( 动态数据交换) 服务程序进行 网络通信和信息处理,并在上位组态监控 平台 VCC( Visual Control Configuration ) 及 VSC(Visual Supervisory Configuration)进行动态监控;另一方面,通过TCP/I P协议与校园网内的远程控制计算机进行数据传送。远程监控级采用了典型的浏览器、Web应用服务器、数据库服务器的B/s模式三层体系结构。其中,Web服务器、 数据库服务器都部署在远程控制计算机上。LonWorks 现场总线控制网络采集的实时数据, 经过数据库服务器存取 由 Web应用服务器以动态网页的形式实时发布,供经过授权的客户端浏览器来监视。 [page]
3 系统的实现
1) 现场控 制网络设计过程控制实验室3套设备的检测量和控制量都不多,所以信号传输速率选78 Kbps; 在拓扑结构及可靠性方面, 选择了总线式拓扑而不是 自由拓扑方式,后者在网络规模较大、信息交换频繁时可靠性不如前者, 而且采用 自由拓扑是以距离为代价的。
2) LON通用智能节点( 硬件) 设计 对于实验室的 3套装置,自行设 计并制 作 了 3个 LonWorks 智能节点,其硬件结构示意 图如图 2所示。神经元芯片 MC143150是节点的控制 核心,它的通讯端 口 CPO, CP1与 FTT-10A通讯模块相连,配合工作 在单端模式,完成网络通讯功能。NVRAM 与 EPROM 共同构成本节点的片外存储器。Servicepin单元用于节点和网络的安装和维护。按照装置检测量和控制量的个数和信号的量程范围, 在每块智能控制节点都设计了8通道模拟量输入/ 输出模块、 4通道 开关 量输入/ 输出模块,每通道模拟量输 入范 围为 1~5v, 模拟量输出范围为4 ~2 0 mA,并带光电隔离。
3) 软件设计 按照模块化结构化设计原则,C S 2 0 0 3的软件模块 由 3部分组成。
①节点内部的数据采集与处理程序模块,由节点开 发软件 NodeBuilder 、节点 映像软件LonManagerProfile和网络安装维护软件 LonMaker 实现。
②上位监控计算机运行的组态监控软件模块, 由上位组态监控软件 VCSC结合网络通信软件 LonManager DDE Server 实现。
③可以在客户端浏览器访问到现场数据的远程实时监视软件模块。
上位组态监控 软件(VCSC) 是基于 Visual Basic 6.0环境下开发的, 包括组态控制(VCC) 和组态监视(vsc) 两套平台。它集控制、人机界面、图形、数据库、网络等技术于一身。
VCC的设计 思想为 在VB环境下利用ActiveX控件制作各可视功能块,每个功能块看作带有输入/ 输出接口和组态参数设置接口的封装体,当用户将自己编制的组态程序下装时,即将程序里功能块的参数按一定的格式存放后分帧打包,通过LonManagerDDE Server 与下 位节 点通讯,将程序写入下位节点的程序存储器中。VSC则包括了可视化的监视画面绘制 S UR—D R A W 程序模块、 数据管理模块、 报警处理模块和远程监视模块。在它的远程监视模块设计中, 由于考虑到需要远程客户端和服务器端双方确认消息,且应确保数据的完整性,因此选用 TCP/I P传输控制协议来进行数据交换。
远程监视软件由数据存储和数据发布两部分完成。数据存储部分是在远程控制计算机上部署数据库服务器, 监听上位监控计算机的连接请求,在与上位监控计算机建立连接后, 远程控制计算机对现场上位机发送过来 的数据进行分类, 通过ODBC ( 开放式数据库互联) 把数据存入数据库 中的相应数据表。而数据发布部分完成的功能主要是部署 We b应用服务器, 建立 We b应 用服务器和数据库服务器的连接, 对Web服务器进行开发使之具有动态网页的发布功能。具体实现为: 首先通过IIS(Internet Information Server) 部署 Web 应用服务器,Web服务器通过 ADO(ActiveX DataObject) 与数据库服务器建立连接 , 不断从数据库服务器取得最新的实时数据,用 ASP编写动态网页。动态网页和实时数据建立绑 定后,客户端通过浏览器就 可以监视最新的现场实时数据。
4) LonWorks网络通信方式 CS2003系统的控制网络通信主要分为两种情况: 一种是上位监控计算机的 VCSC监控平台与 LON通用智能节点之间的通信;另一种是LON通用智能节点相互之间的通信。LonWorks 现场总线通信也有两种方式,一种是通过网络变量进行通信,另一种是通过显示报文来进行。
网络变量是一个节点中的一个对象,从通信的角度分为输入和输出两种类型。无论何时,一个节点的网络变量更新, 则所有与之相连的网络变量也相应地更新。网络变量属于高层通讯方式,实现简单,但其通讯数据域 大 小 固 定( 31byte ) 。因此, CS 2003中 LON通用智能节点相互之间的通信采用网络变量的方式,将现场信号如被测点温度、 压力、 流量等定义为网络变量,只要在网络安装时定义各节点之间网络变量的连接,通信就可通过 LonTalk协议透明地完成。
显示报文属于一种低层通讯方式,其实现相对复杂, 功能却很灵活。显示报文通信数据域大小可变,只要在 228byte范围即可。对于用户组态程序下装这一通讯任务,考虑到组态程序只要使用了3个以上的功能块, 下装通信数据域的大小就会超过网络变量 31byte的限制, 且不同用户的组态程序大小不一, 下装次数不定, 因此组态程序下装通信使用了显示报文方式。[page]
4 应用实验
CS2003目前已实现对过程控制实验室3套控制对象 :三级串联水箱液位系统、温度/流量控制系统、气缸压力控制系统的成功控制。以气缸压力控制系统 P I D控制实验为例, 介绍此套系统的实验步骤及效果。
压力控制系统原理图如图 3所示,它有 3个互相串联的不同大小的气缸装置、 两路进气管道及其上的手动阀 F1 ~F3 、 两台电/ 气转换器、气闭式气动阀 Vcl和 vc2以及 3台压力变送器组成。其中,电/气转换器的输入控制信号为4~2O mA,对 应 输 出 蒸 汽 压 力 2 0~100 kPa( 蒸汽源 0.1 2 MP a ),相应气闭式气动阀的开度为100%~0 , 压力变送器的输入压力信号为0 ~80 kPa 。 对应输出电流信号为4-20 mA。实验步骤如下。
①利用 LonManager LonMaker 安装工具进行网络系统的逻辑安装与配置, 所有的网络配置信息将存储在本地的数据库内,DDE服务器就可以使用该数据库信息来完成有关的任务。
②在上位监控计算机运行LonManager DDE服务程序。 并启动 VCSC组态监控平台。
③在VCC上按照控制要求绘制控制组态图,将组态图下装到 压力系统所对应的LON节点,地址在组网时已确定为 1 。
④在 VS C中按工艺流程绘制组态监视 画面,运行后可观察压力值 的实时曲线,然后根据控制效果在 VC C中在线修改参数值不断进行调试 。
⑤启动 V S C的远程数据发送画面, 输入远程控制计算机的 I P地址, 发送连接请求。与远程控制计算机的连接完成后, 即可向其发送实时数据。
⑥在远程控制计算机上, 配置好 We b服务器并完成相应的 Web服务器开发。使得 Web服务器能从数据库服务器得到最新的数据并具有发布实时动态网页的能力。
⑦在客户端,只需点击 IE浏览器,选择压力控制系统的动态网页名,即在浏览器地址栏输入http://20 2.197.xx .xx /pressure.html 后,即可在计算机屏幕上看到压力控制系统动态网页。
实验运行效果: PID控件的设定值为65 kPa ,Kp =3 , Kd =1 , Ki =0 。压力初始 值 为70.5kpa时, 经过20 S 已接近设定值, 到将近25 s 时则达到了设定值65 kPa 。在上位监控计算机和远程客户端均能正确显示实时数据, 历史数据查询、 多媒体报警、 报表曲线功能正常。系统运行状况良好,达到预期要求。
5 结 论
本文主要介绍了一个具有远程监视功能的LonWorks现 场总 线过 程控制 实验 系统 CS2003 的设计与实 现, 它运用了 LonWorks现场总线控制网络、 ActiveX控件、 Web数据库、 TCP/IP网络通讯等关键技术。实验应用证明了CS2003有效地模拟了工业现场的上位组态监控、 现场数据的网上实时发布和客户端通过浏览器对企业现场进行实时监视 的过程, 组态界面友好、运行实时可靠。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 嵌入式系统实时性的问题
嵌入式系统实时性的问题







 APP下载
APP下载 登录
登录







