×


fast(five一hundredmeteraperturesperi-ealteleseope)soom口径球面射电望远镜是国际大射电望远镜计划在中国的一项先导工作。计划在某喀斯特地貌地区建造口径d~500m的射电望远镜,频率渡盖米波一分米波一厘米波波段(0.3~8.sghz)〔1〕。
随着控制、计算机、测量、通讯、网络等技术的发展,球面射电望远镜的成功实例—美国arecibo305m口径天线越来越呈现造价高、单频工作、精度低等缺点,充分运用新理论、新技术,科研人员提出了新的创新设计思想。在fast光机电一体化设计中,通过若干根悬索长度的控制可实现馈源舱按照天文观测要求的位姿做扫描运动。要实现这一设计思想,现代数字主动闭环控制技术是必不可少的。为了有效地实现主机对多套伺服系统的控制,我们采用了基于can总线的分布式控制与数据采集系统,并在50m模型中得到了成功应用,对此讨论如下。
2分布式数据采集与控制结构方案
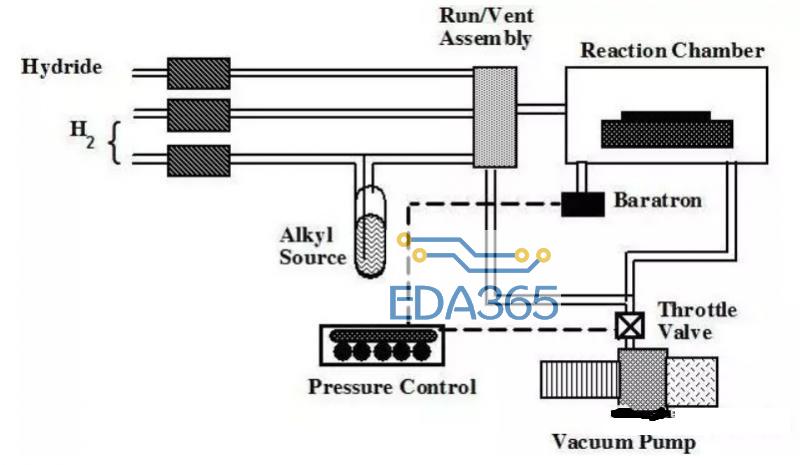
基于can总线的fast系统总体结构如图1所示。fast的分布式控制与数据采集系统由上位主控计算机和分布在直径500m圆周上的六套伺服系统(下位机)及其他若干数据采集节点组成。在主
控计算机与下位机之间存在复杂的、实时的、可靠性要求高的数据通讯,以实现智能数值闭环控制算法与系统监控。can(controllerareanetwork)总线是一种支持分布式实时控制系统的串行通讯局域网络,由于其高性能、高可靠性、实时性好及独特设计,已广泛应用于控制系统中的各检测和执行机构之间的数据通讯。它具有以下的一些技术性能:
(l)多主方式工作,非破坏性的基于优先权的总线仲裁技术;
(2)采用短帧结构,受干扰概率低,每帧信息都有crc校验及其它检错措施;
(3)对严重错误具有自动关闭总线功能,使总线其他操作不受影响。
can总线符合15011898标准,最大传输速率可达imb/s,最大传输距离为10km,传输介质可为双绞线。由于can总线为多主方式工作,最多可挂接110个节点,根据fast控制系统既需集中控制管理,又需分散实时控制的特殊要求,分布式数据采集控制系统采用现场总线式集散控制系统(fdcs)。采用can总线技术对于实现复杂的智能控制、扩增控制系统反馈数据采集节点,具有实际工程易于实现和成本低廉的优点。
整个系统的工作原理为:主控计算机根据所观测星体的赤纬角、时角及地理纬度,计算出各离散时间段内各悬索长度的变化量,并以不同的地址码发送到can总线上,各下位机根据自己的验收屏蔽码接收数据(或指令);从控制现场传感器传送来的信息(如:电机转速、转矩、悬索张力、悬索末端线速度等等)可能为模拟量、开关量或数字量。模拟量经模数转换后发送到can总线上,总线上的其他节点单元和操作站根据自己的需要和设定的验收屏蔽码来判断是否接收该信息。如果该信息需要进一步较为复杂的处理,则可通过上位机来处理并对整个网络进行管理,经过处理后的信息再送回can总线,经通信转换单元控制现场设备。如有重要信息则通过与上位机连接的打印机记录打印保存。
3硬件电路设计
基于can总线的fast分布式数据采集与控制系统各节点都设有与can总线接口的电路,以便把各个节点的不同种类、不同格式的信息都能够在基于can协议的标准下进行通讯。
下位机有数据采集节点和数字控制节点。以数字控制节点为例,核心芯片为intel公司的微处理器89c52,数字控制节点单元的通讯转换接口电路图如图2所示。该电路将can总线上的信息经由can接口电路(主要由82c250组成)和sjai。。o接受,根据接受的指令内容做出相应的控制动作。pl口作为通用1/0口,对电机伺服系统实施实时控制和实时监控。sjai000为philip公司生产的can微控制器,它符合can2.ob协议,完全兼容pca82czoo;支持29位标识符模式,有64字节的接受缓冲区,能通过验收屏蔽码寄存器和验收码寄存器对标准帧或扩展帧进行单向/双向接受滤波;对can总线上的每一个错误可进行错误中断;可通过检测具体位来仲裁丢失中断等特性。所以sjai000的功能有了大大增强,能完成高性能的通信。通过与sjai000的rx、tx连接的电路内的主要芯片为pca82c25o,它是can控制器与物理总线之间的接口,它可以提供对总线的差分发送能力和对can控制器的差分接收能力,抗干扰能力强。内设限流电路可防止发送输出级对电池电压的正端和负端短路。系统中采用了看门狗(watch-dog)复位技术,以保证系统能正常运行。
4软件设计
根据fast分布式控制与数据采集系统各节点与上位机工作站之间距离远的特点,整个系统要求实时控制、实时数据采集、实时故障报替、现场情况显示、数据存储、历史数据查询、打印记录等功能。
底层的控制节点和数据采样节点的软件设计思想为:上电初始化、实时数据采集、实时数据处理、现场信息实时发送、故障实时报警和现场设备实时监控同其它设备的通讯等等。软件流程图如图3所示。
操作站上位机的系统监控、系统参数设定、轨迹规划、控制算法和网络管理的设计思想主要为can接口适配卡初始化、判断网络节点间是否有冲突、设定节点优先级、数据存取、与历史数据比较、根据节点实际情况进行相应处理并回送、报文打印等功能。
其软件流程图如图4所示。操作站上位机发往控制节点的指令集为:启动、等待、复位、停止、空闲、移动。现场控制节点单元对现场设备采用查询方式接收数据,采用中断方式接收来自can总线上的指令。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 SPI总线的特点.工作方式及常见错误解答
SPI总线的特点.工作方式及常见错误解答






 APP下载
APP下载 登录
登录







