CAN总线的简介:CAN(ControllerAreaNewtork)即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。CAN总线是最初由德国Bosch公司在80年代初期,为了解决现代汽车中众多的控制与测试一起之间的数据交换而开发的一种串行数据通信协议,目的是通过较少的信号线将汽车上的各种电子设备通过网络连接起来,并提高数据在网络中传输的可靠性,CAN总线具有较强纠错能力,支持差分收发,因而适合高噪声环境,并具有较远的传输距离,特别适合于中小型分布式测控系统,目前己在工业自动化、建筑物环境控制、机床、医疗设备等领域得到广泛应用。
电动汽车是集计算机技术、通信技术、电子技术、新材料技术等一体化的高科技产品,其结构复杂,有多种相互作用却又相对独立的部件,且车载环境较恶劣,有很强的干扰,用模拟量的控制可靠性不高。先进高效的控制体系结构,可以使电动汽车各系统之间的数据交换满足简单迅速、可靠性高、抗干扰能力强、实时性好、系统错误检测和隔离能力强等要求。本文采用了先进的计算机技术和CAN总线技术,集智能控制、信号采集、数据处理和通信于一体,控制实时性好,可实现整车控制智能化和多传感器信息的有效融合。
CAN总线具有以下几个重要特点:
结构简单,只有两根线与外部相连,且内部含有错误探测和管理模块。
通信方式灵活。可以多种方式工作,网络上任意一个节点均可在任意时刻主动的向网络上的其他节点发送信息,而不分主从。
可以点对点、点对多点及全局广播方式发送和接受数据。
网络上的节点信息可分成不同的优先级,可以满足不同的实时要求。
CAN通讯格式采用短帧格式,每帧字节数最多为8个,可满足通常工业领域中控制命令、工作状态和测试数据的一般要求。同时,8个字节也不会占用总线时间过长,从而保证了通讯的实时性。
采用非破坏性总线仲裁技术。当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响继续传输数据,这大大地节省了总线仲裁冲突时间,在网络负载很重的情况下也不会出现网络瘫痪。
直接通讯距离最大可达1k0m(速率在5kb/S以下),最高通讯速率可达1Mb/s(此时距离最长为40m)。节点数可达110个,通信介质可以是双绞线、同轴电缆或光导纤维。
CAN总线通讯接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。CAN总线采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
系统设计
电动汽车数字控制系统主要由电机驱动控制系统,电池管理系统,动力装置的冷却系统,汽车电器、仪表显示、供电系统,信息通信系统等组成。电动汽车采用双CAN总线结构,电机驱动控制系统、电池管理系统和信息通信系统均采用高速CAN总线通信;动力装置的冷却系统,汽车电器、仪表显示、供电系统采用低速CAN总线系统;高、低速CAN总线系统之间采用网关进行交换,CAN总线符合CAN.20B标准和15011898国际标准。通信介质采用普通屏蔽双绞线。
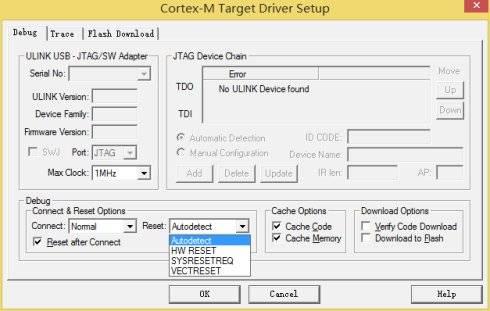
选择合适的MCU是CAN总线数字仪表控制系统设计成功的关键。它必须能适应各类复杂监控系统的要求,如实时性、低功耗、快速数据处理、集成数模外设功能、集成CAN总线接口,还应该集成充足的Flash或RAM供程序、数据存储,以简化电路,提高系统的可靠性。此外,它还要具有低成本和恶劣环境下的适应性。在综合比较了当前业界流行的几款MCU,如DSP2000系列、ATM89系列和C8051F系列之后,最终选择了Cygnal的C805lF这一系列高性能8位单片机。










 热门文章
更多
热门文章
更多

 串口通信属性及事件解析
串口通信属性及事件解析






 APP下载
APP下载 登录
登录







