×


1 引言
光纤具有测距,可复用,非破坏性报警,报警温度可调,传感器输出为光信号,抗电磁干扰等优点。所以现代通信中使用光纤作为信号的传导介质,而在信号的传输过程中,由于温度过高或过低引起的通信中断也时有发生,造成了很大的经济损失,使得对光纤沿线的温度进行实时监测具有很大的实用意义。基于拉曼散射的分布式光纤测温技术,是近十几年来迅速发展的新型测温技术。利用光纤作为温度信息的传感和传输介质。随着光纤的增长,测量点数的增加,单位信息的获取成本大大降低,这是分布式光纤温度传感器相对于其他温度传感器的显著优点。在数据采集和处理方面,通过改善分布式光纤测温系统的信号处理方式,来提高整个系统的测温 和空间定位 。能使分布式光纤测温系统实现真正的分布式测量,完成准确测量、实时测量,从而真正发挥其巨大的实际运用作用。
2 温度测量原理
当激光脉冲在光纤中传输的过程中与光纤分子相互作用,发生多种形式的散射,有瑞利散射、布里渊散射和拉曼散射。这里提出的光纤测温原理是依据背向拉曼散射的温度效应。由于瑞利散射对温度不敏感;布里渊散射对温度和应力都敏感,容易受外界环境干扰,影响测量的准确度;拉曼散射效应可以用入射光与散射介质的相互作用、能量转移加以解释,入射光与散射介质发生非弹性碰撞,在相互作用时,入射光可以放出或吸收一个与散射介质分子振动相关的高频声子,称作为斯托克斯光(Stokes)或反斯托克斯光(Anti—Stokes)。长波一侧波长为λs(λs=λo+△λ)的谱线称为斯托克斯线(stokes),短波一侧波长为λa(λa=λo一△λ)的谱线称为反斯托克斯线,其中斯托克斯光与温度无关,而反斯托克斯光的强度则随温度变化。测量入射光和反射光之间的时间差,可得发射散射光的位置距入射端的距离,这样就实现了分布式的测量。
基于拉曼散射的测温系统的改善和方案设计
用反斯托克斯光和斯托克斯光的比值表示温度:
式中:Ia,Is分别是AnTI—Stokes和Stokes的光强度,λa,λs分别为AnTI—Stokes和Stokes的波长,h为普朗克常量,c为光速,μ为波尔兹曼常数,T为 温度。
实际的测量中,这两种不同波长光的衰减差异和探测器对这两种光的响应差异,要通过设定定标区来消除,定标区设置在光纤的前200 m,把它放入恒温箱作为参考光纤,设置其温度为T0,则在测温系统标定之后,通过测定R(T)就可确定沿光纤各测量点的温度值。
3 测温系统的方案设计
3.1 光纤分布式测温的实现过程
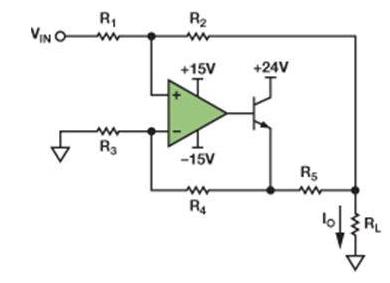
在同步控制单元的触发下,光发射机产生一大电流脉冲,该脉冲驱动半导体激光器产生大功率的光脉冲,并注入激光器尾纤中,从激光器尾纤输出的光脉冲要经过光路耦合器后进入一段放置在恒温槽中的光纤,这一段光纤用于系统标定温度,然后进入传感光纤。当激光在光纤中发生散射后,携带有温度信息的拉曼后向散射光将返回到光路耦合器中,光路耦合器不但可以将光脉冲直接耦合至传感光纤,而且还可以将散射回来的不同于发射波长的拉曼散射光耦合至分光器。分光器由两个不同中心波长的光滤波器组成,分别滤出斯托克斯光和反斯托克斯光,两路光信号经过接收机进行光电转换和放大,然后由数据采集单元进行高速数据采样并转换为数字量, 经过对信号进一步处理。用于温度的计算。图l给出测温系统框图。
3.2 数据采集和处理
基于拉曼散射的测温系统的主要缺点是散射光信号很弱,约为入射光的l/lO8,信噪比很小,测量的信息几乎完全淹没在噪声中,以DSP系统为 的信号处理单元完成对光电检测器输出信号的放大、采样、处理并解调出温度。数据处理的 就是在有效地抑制噪声的条件下放大微弱信号的幅值。
3.2.1 拉曼散射信号的特点
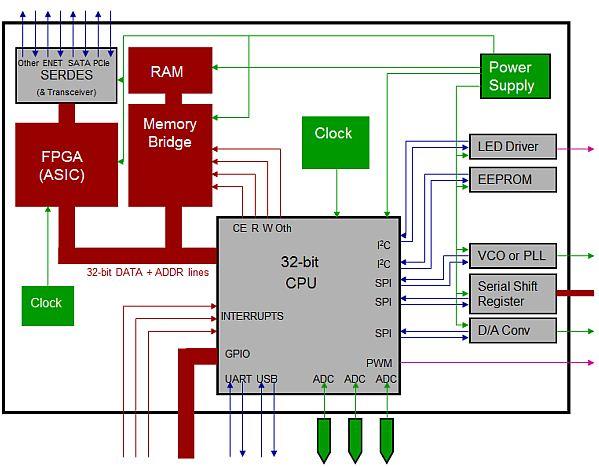
①信号的信噪比很低,有用的温度信息全部淹没在噪声中;②一般情况下,有用的温度信息频率较低,而噪声的频率较高;③信号的噪声强度呈喇叭状,近端小,远端大。根据测温系统中信号的特点,系统提出了采用累加平均和小波分析相结合的方法处理所采集的数据。得到更为准确的温度信号。图2给出拉曼散射信号测试图形。
3.2.2 信号预处理(累加平均)
由于光纤测温系统中的噪声主要是具有零均值的统计特性,可以用数字累加的方式去除系统中的低频噪声干扰,用噪声的统计特性来达到降噪的目的。为提高信噪比,信号处理采用数字平均的方法,即将 测量的N点数据依次存储到DSP内存单元中,将下 测量的N点数据与内存对应单元的数据相加,再放回原内存单元,依次循环M次,然后,对各单元求平均。图3给出数字累加流程图。
将每次测量的N点数据写成向量的形式,即第i次的测量结果可表示为:
即向量B的每个元素[b1,b2,b3,…bN]代表各个测量点M次测量的均值。设被测信号f(t)=s(t)+n(t),其中s(t)为原始信号,n(t)为方差σ2的Gaussian白噪声,服从N(0,σ2)分布。
则第j点的M次测量的数字平均可表示为
式中T为取样间隔。
由式(3)可得信噪比(SNR):
式中Pa,PN分别表示以方差定义的信号和噪声功率,单位为J/s;SNRbj,SNRaij分别表示bi和aij的信噪比,单位为dB。
由式(4)可知,经M次数字平均后,采样信号的信噪比有很大改善。由于对每个bi相对于aij都满足式(3),故均值序列B相对于单次测量序列Ai也满足式(3)。因此,当M足够大时,可以将序列B作为待测信号的一个无偏估计。由以上分析可知,采用数字平均的方法可大大提高采样信号的信噪比。
3.2.3 利用小波变换去噪声的理论依据
由于白噪声具有负的Lipschitz指数,且其幅度和稠密度随尺度增加而减少,因此如果某个信号的小波变换局部模极大值及稠密度随尺度的减小而快速增大,则表明该处的奇异性主要由噪声控制,在消噪时应该去除。利用信号和噪声在小波变换各尺度上的不同传播特性,把有用信号从噪声中提取出来。
(1)信号的特性常用信号Lipschitz指数大于零,即使是不连续的奇异点信号只要在某一领域中有界,也有a=O。而且,在较小的尺度上,模极大点的个数基本相等。
(2)噪声的特性 噪声所对应的Lipschitz指数通常是小于零的。如高斯白噪声是一个几乎处处奇异的随机分布,它具有负的Lipschitz指数,而且,高斯白噪声的平均稠密度是反比于尺度2j的,即尺度越大,其平均稠密度越稀疏。
以上分析表明,信号与噪声在小波变换各尺度上的模极大值居于截然不同的传播特性,这为利用小波变换模极大值去噪提供了重要依据。通过观察不同尺度上的小波变换模极大值的渐变规律,模极大值点的分布规律,估计奇异点位置及其Lipschitz指数,即可将信号与噪声分离,实现小波去噪。
3.2.4 算法的基本思想
根据信号与噪声在不同尺度上的模极大的不同传播特性,从所有小波变换模极大值中选择信号的模极大值,而去除噪声模的极大值,然后用剩余的小波变换模极大值重构信号。
3.2.5 具体的算法步骤
(1)对含噪信号进行离散二进小波变换。所选分解尺度数使在 分解尺度下信号的模极大点个数占优,且信号的重要奇异点不丢失。一般选尺度数为4或5为宜。
(2)求出每个尺度上小波变换系数W2if对应的模极大点。
(3)在 分解尺度J,小波变换模极大值几乎完全由信号控制,选取一个阈值,使得模极大值小于该阈值,由此,W2if得到 尺度上新的模极大点。
(4)从尺度J上的每个模极大点开始,用ad hoc算法向上搜索其对应的模极大曲线。在尺度j一1(j=J,…4,3)上寻找尺度j上每个模极大点对应的传播点,保留信号产生的模极大点,消除由噪声引起的模极大值点;并将每个尺度j上不在任意模极大曲线上的极值点去掉,这样逐级搜索,直到尺度J=2为止。
(5)对于尺度j=1,在j=2存在极值点的位置上保留j=l时相应的极值点,而将其余位置上的极值点置为零。
(6)由各尺度保留下来的模极大值及其极值点的位置,选用适当重构方法得到去噪信号。
图4给出数据处理后的信号。
4 结语
光纤测温具有广泛的应用范围,完整的理论依据,并实际用于的各种场合,可以将其产品化。配合累加的数据处理和小波去噪的微弱信号处理方法,使测温系统的空间分辨率和温度分辨率都得以提高,保证了一定的 。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 吉时利3700系列主机--目标应用
吉时利3700系列主机--目标应用






 APP下载
APP下载 登录
登录







