×


目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低 。
就小型电动四轴飞行器,简要介绍飞行器所涉及到的原理。
硬件构成
飞行器由机架、电机、螺旋桨和控制电路构成。

图1 四轴飞行器整机
电气构成
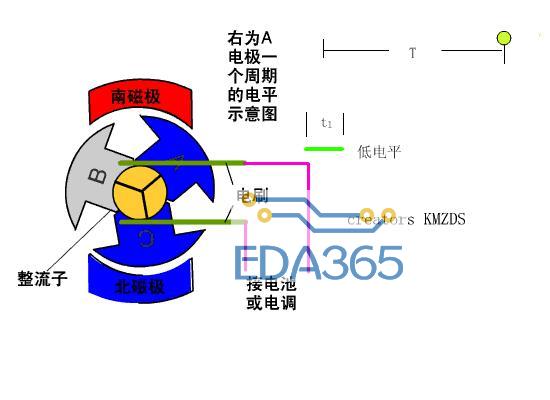
电气部分包括:控制电路板、电子调速器、电池,和一些外接的通讯、传感器模块。控制电路板是电气部分的,上面包含 MCU、陀螺仪、加速度计、电子罗盘、气压计等芯片,负责计算姿态、处理通信命令和输出控制信号到电子调速器。电子调速器简称电调,用于控制无刷直流电机。电气连接如图 2所示。

图2 电气连接图
软件构成
上位机
上位机是针对飞行器的需要,在 Qt SDK 上写的一个桌面程序,可以通过串口与飞行器相连,具备传感器校正、显示姿态、测试电机、查看电量、设置参数等功能,主界面如图3。
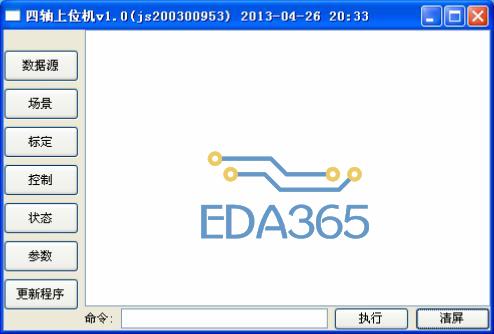
图3 上位机界面
下位机
下位机为飞行器上 MCU 里的程序,主要有三个任务:计算姿态、接受命令和输出控制。下位机直接控制电机功率,飞行器的安全性、稳定性、可操纵性都取决于它。
飞行原理
坐标系统
飞行器涉及两个空间直角坐标系统:地理坐标系和机体坐标系。地理坐标系是固连在地面的坐标系,机体坐标系是固连在飞行器上的坐标系。地理坐标系采用“东北天坐标系”,X 轴指向东,为方便罗盘的使用,Y 轴指向地磁北,Z 轴指向天顶。机体坐标系原点在飞行器中心,xy 平面为电机所在平面,电机分布在{|x|=|y|,z=0}的直线上,象限的电机带正桨,z 轴指向飞行器上方。

图四 地理坐标系和机体坐标系图示
姿态的表示和运算
飞行器的姿态,是指飞行器的指向,一般用三个姿态角表示,包括偏航角(yaw)、俯仰角(pitch)和滚转角(roll)。更深一层,姿态其实是一个旋转变换,表示机体坐标系与地理坐标系的旋转关系,这里定义姿态为机体坐标系向地理坐标系的转换。旋转变换有多种表示方式,包括变换矩阵、姿态角、转轴转角、四元数等。
动力学原理
螺旋桨旋转时,把空气对螺旋桨的压力在轴向和侧向两个方向分解,得到两种力学效应:推力和转矩。当四轴飞行器悬停时,合外力为 0,螺旋桨的推力用于抵消重力,转矩则由成对的正桨反桨抵消。当飞行器运动时,因为推力只能沿轴向,所以只能通过倾斜姿态来提供水平的动力,控制运动由控制姿态来间接实现。
四轴飞行器的主要工作原理如上所述,由于姿态测量与控制在此不做展开。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 数字积分器性能分析
数字积分器性能分析








 APP下载
APP下载 登录
登录







