×


摘要:双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结 构分析一种双足机器人的起立方法,主要分析了起立过程的动作规划,分阶段计算出使机器 人稳定不发生倾倒所要满足的各种条件,实际验证了这一起立方法分析的正确性。
1 引言
机器人技术是电子、机械、人工智能等各个领域新技术的结晶,双足机器人的研究作为 机器人学的一个分支,无疑对机器人研究的技术和思想提出了更高的要求。 双足机器人的起立动作是双足机器人的基本动作之一,在双足机器人进行双足步行之 前,首先要保证机器人处于站立状态。而从俯卧到站立的过程就是机器人的自起立的过程, 在这个过程中要保证机器人不发生倾倒,就需要规划机器人的整个动作。在这里我可以通过 将机器人简化为连杆结构。通过平面连杆的相关理论进行分析,对整个动作进行规划。
2 连杆模型
本文的研究对象是一台至少具有13 关节自由度(不考虑手指的自由度)的双足步行机构, 每条腿各有3 个自由度, 即:踝关节、膝关节、髋关节分别具有一个前向自由度;腰部有一 个转弯自由度;每个肩关节具有二个自由度, 包括前向和侧向度;每个手臂的肘关节具有一 个前向自由度。机器人的起立规划运动,由三个旋转关节和八个前向关节的协调运动来实现, 由于起立动作所涉及的自由度大都集中在侧向的平面内,所以可以用连杆机构来分析机器人 的起立动作,并用D-H 方法建立模型。
3 起立过程分析
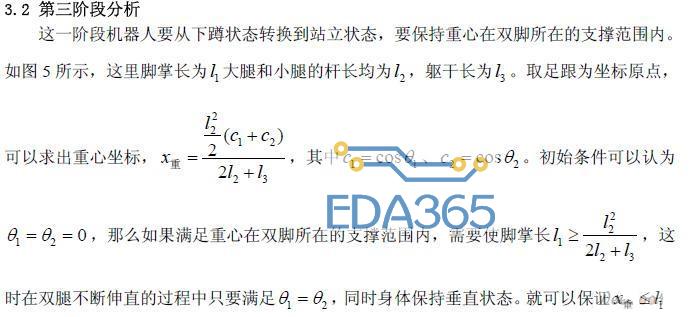
起立过程主要是保证机器人从俯卧状态转换到双足站立的状态,并在起立过程中不发生 倾倒,那就要满足在静态运动时重心保持在机器人的支撑范围内。根据这一基本原理,可以 将起立过程分为三个阶段,如图1 所示,个阶段机器人从俯卧状态开始,双腿开始弯曲 同时双臂向前伸直形成跪立状态。第二阶段机器人从跪立状态开始重心不断后移到双脚支撑 范围内形成双脚支撑的下蹲状态。第三阶段从下蹲状态开始向上站立,直到双腿伸直形成直 立状态。在三个阶段中,个阶段由于在双臂和双膝的支持下,只要保持双臂和双膝动作 一致就不会发生倾倒。而第二三阶段由于重心的不断移动则容易发生倾倒,下面将具体分析。

3.1 第二阶段分析
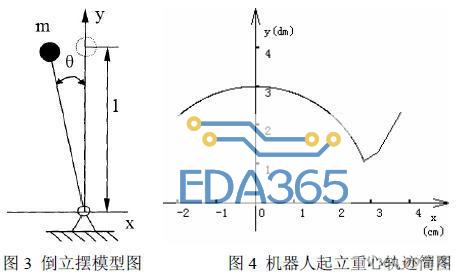
在这个阶段,机器人要从跪立状态转换到下蹲状态,这里可以用连杆结构来分析。首先 建立连杆模型,如图2 所示。
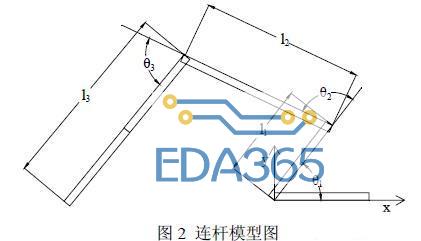
由于小腿着地所以整体分析手臂、身体、大腿这三个连杆,这里取膝关节所在位置为基 坐标系(即坐标系{0})原点,三个连杆长度分别为∫1、∫2 、∫3 ,夹角为θ1 、θ2 、θ 3。根据 Denavit-Hartenberg 法则建立个连杆的坐标系,其齐次变换通式为
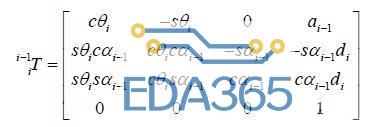
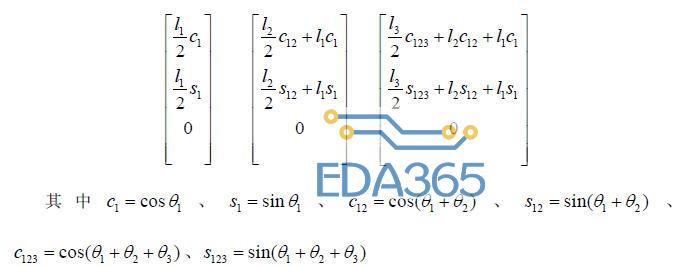
齐次变换通式描述了坐标系i 相对于坐标系i-1 的位置关系。这样可以求出每个连杆相 对于基坐标系的位置关系,假设连杆的质量分布均匀密度相似,则每个连杆的重心位置为连 杆的中点,这样通过齐次变换矩阵,每个连杆的重心在基坐标系上的坐标x1, x2 , x 3可求:
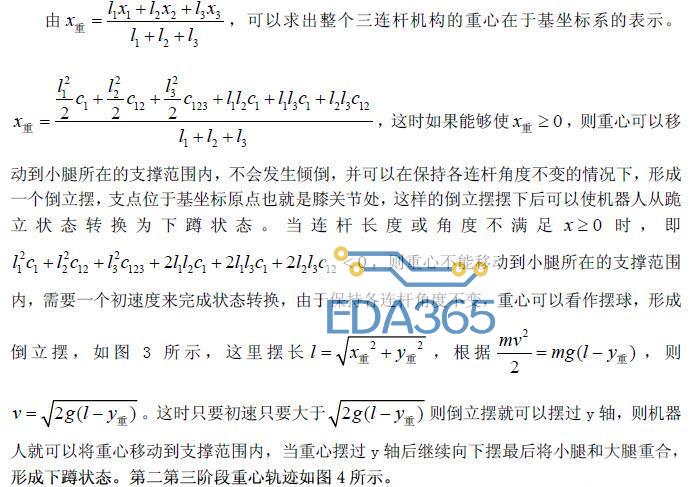
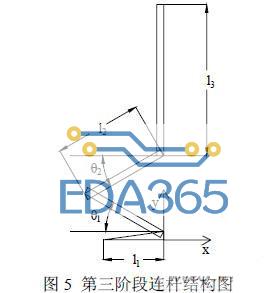
也就是不会发生倾倒。从而完成从下蹲状态到站立状态的转换。
4 实际应用
根据上述分析,可以保证静态平衡条件,通过适当的几何约束即可求解机器人运动的各 关节的运动和关节轨迹,将各关节的转角信息写入数据文件,使机器人实现起立运动规划。而 且这种起立方法不但适用于四连杆结构的机器人,还适用于四个以上连杆机构的起立动作。 由于多连杆机构可以转换成四连杆机构。只要将几个连杆当作躯干部分的连杆,其他连杆作 为手臂和大腿和小腿部分,则通过上述起立方法一样可以完成起立动作。 这个起立动作已经在实际的机器人平台上实现了,实际试验选用的机器人硬件平台共有 17 个舵机和17 个自由度 (leg 5× 2, waist 1, arm 3× 2),内置控制电路板及电池。机器人通过 RS232 串口线直接和计算机连接,在这一平台上根据上述分析实现了起立动作。
5 结论
本文介绍了一种机器人自起立的方法,并通过连杆结构加以分析,总结出了实现稳定的 不发生倾倒的起立动动作时,机器人所要满足的基本条件。通过适当的几何约束即可求解机 器人运动的各关节的运动和各关节的轨迹规划,并且可扩展实现四个以上连杆机构的机器人 起立动作,后续实验已经验证了这一起立方法分析的正确性。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 电机磁路中的5大定律
电机磁路中的5大定律







 APP下载
APP下载 登录
登录







