×


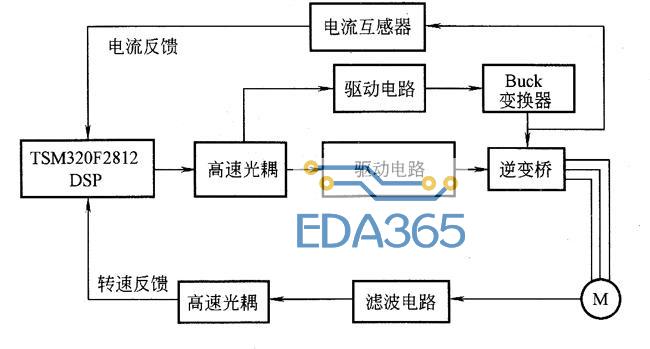
根据磁悬浮控制力矩陀螺用高速永磁无刷直流驱动电机系统性能要求的特点,考虑空间应用低功耗的要求,设计了以TI公司的TMS320F2812 DSP为的数字控制系统。控制系统包括电流检测电路、模拟信号滤波和放大电路、功率开关器件驱动电路、三相逆变桥、霍尔转子位置传感器滤波电路、转速检测电路等。整个的硬件系统框图如图所示
软件设计有以下基本要求:
(1)控制软件要求有快速的实时性 电机控制要求必须在一定的时间限制内,完成一系列的软件处理过程。例如,对电机的被控参数(如转速、电流、电压等)的反馈信号进行采样、计算、逻辑判断,按规定的控制算法进行数值计算,输出各种控制信号,以及对突然出现的故障报警和处理等。上述各种处理,若超过一定的时间,就失去了实时的意义。电机的控制一般都是快速过程,为了满足实时性要求,需要对控制软件的指令执行时间进行计算。
(2)控制软件要有很高的可靠性 软件的可靠性是指软件在运行过程中避免发生故障的能力,以及一旦发生故障后的解脱和排除故障的能力。软件设计时应考虑电机在运行时可能出现的一切非正常情况,以提高软件的可靠性。
(3)控制软件要有易修改性 一个好的完整的控制软件常常是经过很多次的修改才完善,终才满足所要求的功能和特性的。好的控制程序必须有良好的结构设计,以有利于提高软件在反复调试、修改和补充过程中的效率。
控制系统中,中断程序往往用于处理实时性较强的各种输人、输出事件。中断源的充分利用和合理分配,往往决定了整个控制软件的实时性和可靠性的优劣。TMS3⒛F2812A DSP具有强大的中断处理能力,充分利用其强大的中断处理能力处理电流采样、位置捕获及PWM波形输出等异步事件是整个控制软件的主要内容。软件由主程序和各中断子程序组成。主程序负责系统初始化及电机初始位置检测,等待中断;捕获中断负责监测转子位置及计算即时速度等。
1.ADO中断完成电流的采集与转换
在控制系统工作之前需要对寄存器等相关参数进行设置,这就是系统初始化。
InitSysCtrl(); // 初始化系统寄存器、PPL、看门狗、时钟
InitCpio(); // 设置GPIO工作模式
DINT; // 禁止和清除CPU中断
IER=0x0000;
IFR=0x0000;
InitPieCtrl(); // 初始化PIE寄存器
InitPieVectTable(); // 初始化中断向量表
InitCpuTimers(); // 初始化Timet0
StartCpuTimet0();
Initperipheral;
IERI=0x0015;
EINT; // 全局中断使能
ERTM;
2.换向、测速中断
捕获中断主要是为了获得电流的换向控制字并计算电机速度值。在捕获中断时,需要将CAP对应引脚由捕获状态设置成通用I/O状态,获得三个霍尔信号值后,将其转化为相应数值,以此寻找相应电机转向控制字,来控制电机换向。在退出中断前需恢复捕获功能设置。
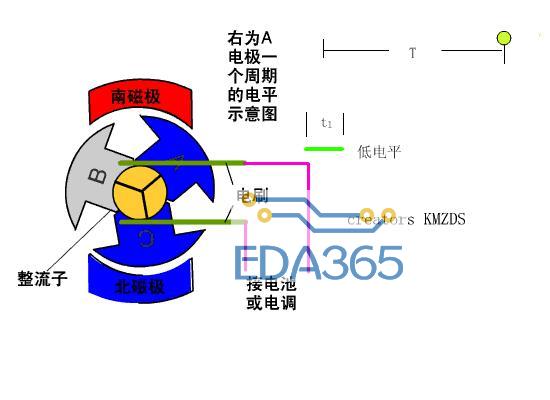
三相六状态控制方式下的永磁无刷直流电机每旋转360°电角度,3个霍尔共会产生6个上升沿与下降沿的电平转换信号。
3.电流采样中断
电流闭环控制的好坏与电流采样的精度有很大关系。本系统采用TimerO定时器触发A/D采样中断,并根据前向滤波电路截止频率,A/D采样频率选择10kHz。为了提高A/D采样精度,采用8次加权滤波求平均的控制算法。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 利用TI DLP®技术驱动结构光系统实现箱拣
利用TI DLP®技术驱动结构光系统实现箱拣







 APP下载
APP下载 登录
登录







