APP下载
APP下载 登录
登录







开关磁阻直线电机结合传统开关磁阻电机和直线电机优势,电机动子直接与负载相关联,消除了传统的机械传动系统,减少了损耗,降低了成本,同时电机具有起动力矩大,过载能力强,调速范围广等优点。相比其他的交流直线电动机,LSRM在高精度加工以及大功率传输方面有更广泛的应用前景。但是LSRM是一个多变量高度耦合、非线性很严重的系统,常规控制方法因为参数的变化不能在整个工作范围内兼顾稳态精度和动态性能要求,难以获得良好的控制效果。近来发展起来的 Fuzzy控制是一种仿人智能控制法,它不依赖被控对象的数学模型,便于利用人的经验知识实行控制,这对于一些复杂可变或结构不确定,难以用准确的数学模型描述的系统而言是非常适宜的,具有较强的鲁棒性,特别是对于无法确定的复杂对象具有较好的控制性能。本文用Matlab仿真,通过模糊控制和PD控制的比较,证实了模糊控制在大范围变动时,动态响应快,超调小,且具有良好的鲁棒性。为开关磁阻直线电动机的实际应用提供了一种有效的方法。
1 LSRM结构
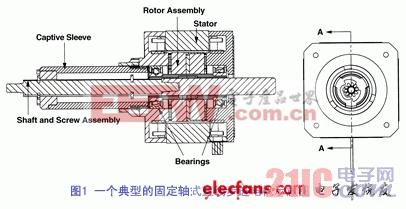
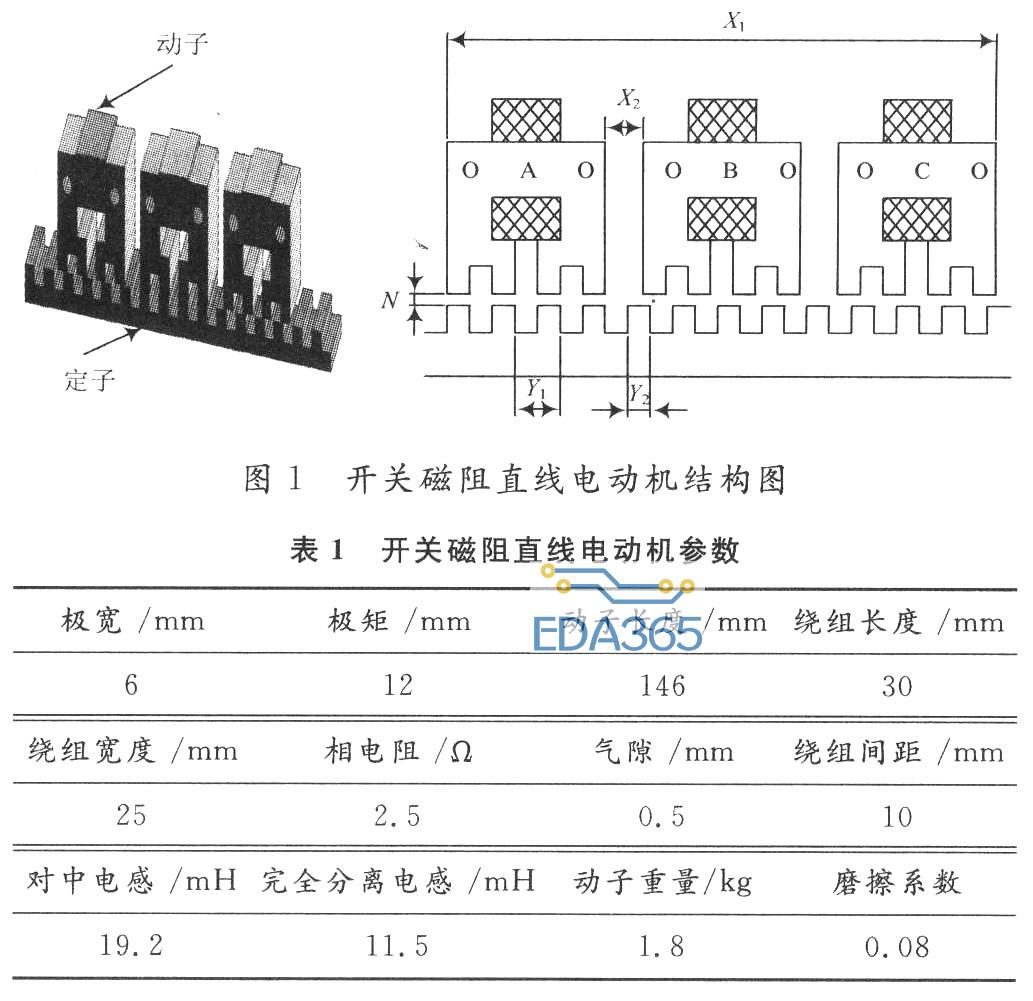
开关磁阻直线电动机的结构如图1所示,电动机由动子和定子两部分组成,动子结构件由铝型材制作,惯性小,磁路隔离效果好,3个相同的绕组安装在动子上,三相绕组间按互差120°电角度排放;定子导轨由条状O.5 mm厚的硅钢片叠成。电动机电气和机械参数见表1。
2 LSRM数学模型
直线开关磁阻电动机的单相回路电压平衡方程为:

式中:Uj为j相绕组的电压;Rj为j相绕组的电阻;ij为j相绕组的电流;ψj为j相绕组的磁链。

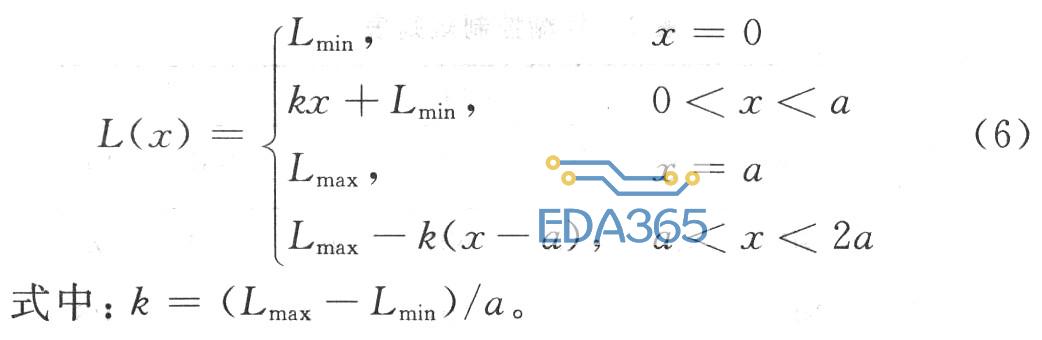
这里电感Lj是相电流ij和动子相对位移x的函数。
将式(1)代人式(2)中,可得:
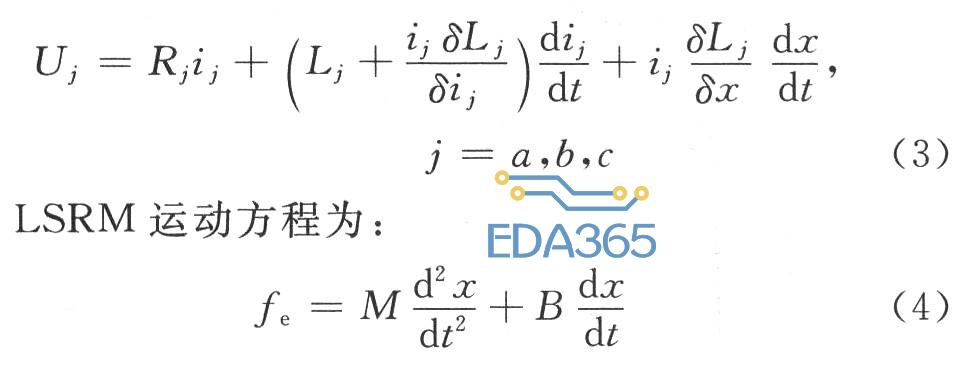
式中:M是电机动子的质量;B是摩擦系数;x是动子位置;fe是电机产生的电动力。

尽管上述LSRM的数学模型从理论上完整、准确地描述了LSRM电动机中的电磁及力学关系,但由于L(x,i)以及i(x)难以解析,使用起来却很麻烦,往往根据要求和实际情况做简化。








 热门文章
热门文章