APP下载
APP下载 登录
登录







摘要:针对目前教学仪器昂贵,实验仪器设备紧张的情况,本文设计并制作了基于LabVIEW的半实物虚拟仿真实验平台。硬件系统以MSP430单片机为主控单元,设计了无刷直流电机信号采集模块、输出驱动模块和温度监测模块。软件系统包含MSP430单片机测控程序和基于LabVIEW的虚拟仪器应用程序。系统能够完成无刷直流电机相关的测试、测量和控制。实验结果表明:系统工作稳定,误差在设计允许范围内。
引言
传统仪器主要由信号采集与控制模块、分析与处理模块以及测量结果的表达与输出模块这三大功能模块组成。传统仪器的这些功能都是以硬件(或固化的软件)形式存在的。而虚拟仪器则是将这些功能移植到计算机上完成。运用计算机,使用数据采集卡,利用软件在计算机中生成仪器面板,并利用软件进行信号的分析与处理。相对于传统仪器,虚拟仪器具有性能高、扩展性强、开发时间短、集成功能优秀等特点。
随着经济持续快速发展,各个高校对实验室的要求也不断提高,然而,现在各种精密仪器的昂贵价格增加了学校的压力,也使一些学生得不到良好的实验条件。基于以上背景,本文设计了基于LabVIEW的半实物虚拟仿真平台,它采用虚拟仪器和实物相结合,将一些实物平台用虚拟仪器来代替,既节省了在仪器上的投入,也可以达到实验目的。
1 基于LabVIEW的半实物虚拟仿真平台系统总体方案设计
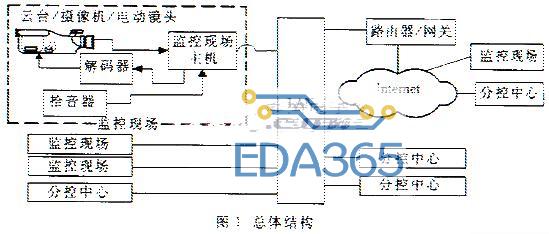
本设计中,各种被测信号经过传感器、放大整形滤波、现场单片机(MSP430)采集缓存等处理后,输送到单片机中,通过单片机计算处理后,实现与上位机的通信。同时,来自上位机的信号经RS232总线传输到采集节点,驱动数据采集。基于LabVIEW的半实物虚拟仿真平台系统整体结构框图如图1所示。
其中电源电路使用24V稳压电源,保障电源的稳定,霍尔传感器的输出脉冲信号要先进行放大滤波处理后再送入A/D转换器转换成数字量。驱动电路通过隔离电路达到弱电控制强电,从而驱动电机。温度传感器输出的是数字量,直接被MSP430采集,采集到的数据缓存供单片机调用。采集节点通过RS232总线与上位机通讯,实现各项数据的实时显示、存储和越限报警等功能。
2 系统硬件设计
2.1 单片机控制部分
MSP430系列单片机有独特的时钟系统设计,包括两个不同的时钟系统:基本时钟系统和锁频环(FLL和 FLL+)时钟系统或DCO数字振荡器时钟系统。由时钟系统产生CPU和各功能模块所需的时钟,这些时钟可以在指令的控制下打开或关闭,从而使单片机执行相应的程序,达到控制目的。
2.2 电机驱动模块
BLD-300B直流无刷电机驱动器是针对中功率低压直流无刷电机的高性能无刷驱动产品。该直流无刷电机驱动器采用高性价比的解决方案设计而成,适用于功率为48V、440W,或24V、300W的三相直流无刷电机的转速调节。BLD-300B可提供内置电位器RV调速、外接电位器调速、外部模拟电压调速、上位机(PLC,单片机等)PWM调速等功能。同时该驱动器具备大转矩启动、快速启动及制动、正反转切换、手动及自动调速相结合、异常报警信号输出等特点。输入电压为DC 18~52V,输出电流为0~35A,适用电机转速为0~20000rmp,霍尔信号电压为4.5~5.5V,霍尔驱动电流20mA,外接调速电位器10kΩ。输出信号如图2所示。
2.3 信号传输模块
串口通讯对单片机而言意义重大,且其所需电缆线少,接线简单,所以广泛应用于远距离传输中。如图3所示。
在串行通信中,数据通常是在两个站之间传送,按照数据在通信线路上的传送方向可分为3种基本的传送方式:单工、半双工和全双工,通讯方式如图4所示。
单工通信使用一根导线,信号的传送方和接收方有明确的方向性。也就是说,通信只在一个方向上进行。
若使用同一根传输线既作为接收线路,又作为发送线路,虽然数据可以在两个方向上传送,但通信双方不能同时收发数据,这样的传送方式称为半双工。采用半双工方式时,通信系统每一端的发送器和接收器通过收发开关分时转接到通信线上进行方向的切换。
当数据的发送和接收分别由两根不同的传输线传送时,通信双方都能在同一时刻进行发送和接收操作,这样的传送方式就是全双工传送方式。在全双工方式下,通信系统的每一端都设置了发送器和接收器,因此,能控制数据同时在两个方向上传输。全双工方式无须进行方向的切换。
3 系统软件设计
3.1 软件总体设计
根据系统总体方案的设计要求,系统软件程序主要实现功能为:2项被测数据的检测、处理和传输。软件结构框图如图5所示。
系统选用C语言编写程序,程序设计首先对传感器、单片机和上位机显示等进行初始化。MSP430控制启动数据采集,进行AD转换,转换完成后进行处理并存储在MSP430内部设计的RAM中,单片机读取RAM中的信号并显示。具体流程如图6所示。
3.2 串口通信
以下对串口通信中一些需要注意的地方作一点说明:
(1)波特率选择
波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。MSP430串行端口在四种工作模式下有不同的波特率计算方法。在选择波特率的时候需要考虑两点:首先需要考虑系统需要的通信速率。这要根据系统的运作特点,确定通信的频率范围。然后需要考虑通信时钟误差。使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。
(2)通信协议的使用
通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。
(3)硬件连接
进行串行通讯时要满足一定的条件,例如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路。
(4)通信数据显示
为了能够在计算机端看到单片机发出的数据,我们必须借助一个WINDOWS软件进行观察,这里利用一个免费计算机串口调试软件(串口调试助手)来观察。
3.3 上位机显示程序设计
上位机要实现与下位机的通信,实现不同节点的选择,参数数据的上传,数据的实时显示,以及不同参数的趋势图绘制。上位机的工作流程如图7所示。








 热门文章
热门文章