APP下载
APP下载 登录
登录







摘要:采用AT89S52单片机为主控制芯片,结合直流电机、多种传感器、红外遥控及其他外围电路,设计实现了一种沿黑色轨迹行走的智能循迹小车,同时还能自动避障,并在遥控的作用下完成小车行走的控制。实验证明整个系统设计灵巧、控制准确、工作稳定、使用效果良好。
关键词:AT89S52;智能寻迹;避障;直流电机;红外光电传感器
随着计算机、微电子、信息技术的快速发展,智能化技术的开发速度越来越快,智能度越来越高,应用范围也得到了极大的扩展。智能小车作为移动式机器人中的一个重要分支,具有环境感知、规划决策、自动行驶等功能,是智能化技术中一个典型的例子。设计者可以通过软件编程,让小车在预先设定的模式中实现行进、寻迹、避障等精确控制,无需人工干预,当有特殊需要或在出现故障的情况下还可以对小车进行远程遥控,可以应用于科学勘探等用途,具有广阔的发展前景。
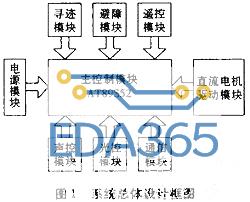
1 系统总体设计框图
本设计中,智能小车是由主控制模块、电机驱动模块、循迹模块、避障模块、遥控模块、声控模块、光控模块、电源模块和其他外围电路组成,其总体硬件结构框图如图1所示。
2 系统硬件设计
2.1 主控制及电源模块
智能小车采用现在较为流行的8位单片机作为系统大脑。以8051系列家族中的AT89S52为主芯片。40脚的DIP封装使它拥有32个完全IO(GPIO-通用输入输出)端口,通过对这些端口加以信号输入电路,控制电路,执行电路共同完成智能小车的功能。电源模块用4节1.5 V的电池供电,经L7805稳压模块后,输出电压稳定在+5 V,从而向各个模块供电。








 热门文章
热门文章